
Waabi dit que ses robotrucks virtuels sont suffisamment réalistes pour prouver que les vrais sont sûrs
- Intelligence Artificielle
 Noesis News
Noesis News- 0
- 4 minutes de lecture
Waabi
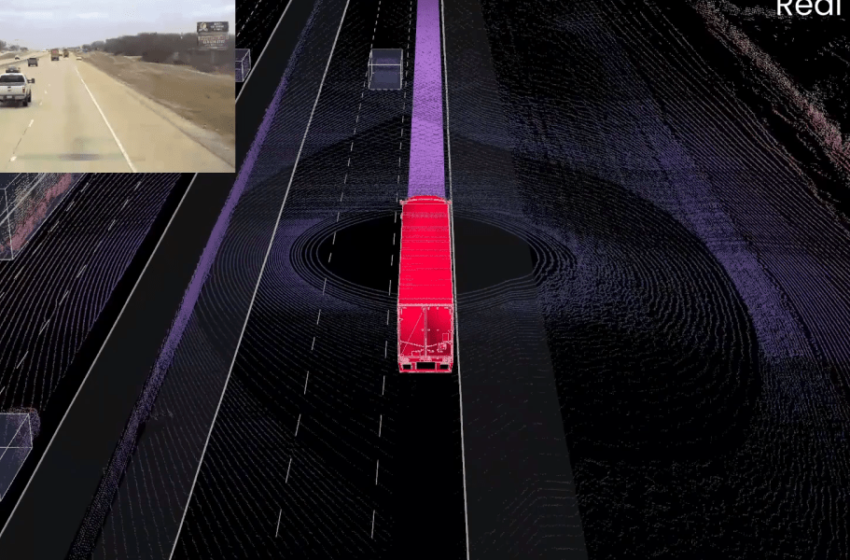
Voici comment cela fonctionne. Chaque fois que ses vrais camions roulent sur une autoroute, Waabi enregistre tout – video, radar, lidar, l’état du modèle de conduite lui-même, etc. Il peut rembobiner cet enregistrement à un certain moment et cloner le congé avec toutes les différentes données de capteur intactes. Il peut alors laisser tomber ce gel-came dans Waabi World et appuyer sur le jeu.
Le scénario qui se déroule, dans lequel le camion virtuel roule le long de la même tronçon de route que le vrai camion, devrait correspondre presque exactement au monde réel. Waabi mesure ensuite jusqu’où la simulation diverge de ce qui s’est réellement passé dans le monde réel.
Aucun simulateur n’est capable de recréer trop longtemps les interactions complexes du monde réel. Waabi prend donc des extraits de sa chronologie toutes les 20 secondes environ. Ils exécutent ensuite plusieurs milliers de ces extraits, exposant le système à de nombreux scénarios différents, tels que les changements de voie, le freinage dur, le trafic venant en sens inverse et plus encore.
Waabi affirme que Waabi World est précis à 99,7%. Urtasun explique ce que cela signifie: «Pensez à un camion conduisant sur l’autoroute à 30 mètres par seconde», dit-elle. «Lorsque cela progresse 30 mètres, nous pouvons prédire où tout sera dans les 10 centimètres.»
Waabi prévoit d’utiliser sa simulation pour démontrer la sécurité de son système lors de la recherche du feu vert des régulateurs pour retirer les humains de ses camions cette année. «C’est une partie très importante des preuves», explique Urtasun. «Ce n’est pas la seule preuve. Nous avons le Bureau traditionnel des véhicules à moteur en plus de cela – toutes les normes de l’industrie. Mais nous voulons pousser ces normes beaucoup plus haut. »
«Un match de 99,7% dans la trajectoire est un résultat fort», explique Jamie Shotton, scientifique en chef de la startup de voiture sans conducteur Wayve. Mais il note que Waabi n’a pas partagé de détails au-delà du article de blog annonçant le travail. «Sans détails techniques, sa signification n’est pas claire», dit-il.
Shotton dit que Wayve favorise un mélange de tests du monde réel et du monde virtuel. «Notre objectif n’est pas seulement de reproduire le comportement de conduite passé, mais de créer des environnements de test et de formation plus riches et plus difficiles qui poussent davantage les capacités AV», dit-il. « C’est là que les tests du monde réel continue d’ajouter une valeur cruciale, exposant l’AV aux interactions spontanées et complexes que la simulation seule peut ne pas se reproduire entièrement. »
Malgré cela, Urtasun estime que l’approche de Waabi sera essentielle si l’industrie des voitures sans conducteur va réussir à grande échelle. «Cela traite de l’un des gros trous que nous avons aujourd’hui», dit-elle. «Ceci est un appel à l’action en termes de, vous savez – je me rédige votre numéro. Il est temps d’être responsable dans toute l’industrie. »



