
Robo-Insight # 6 – RoboHub
- Robotique
 Noesis News
Noesis News- 0
- 18 minutes de lecture

Source: Openai’s Dall · e 2 avec rapide « Une image hyperréaliste d’un robot lisant les nouvelles sur un ordinateur portable dans un café »
Bienvenue dans la 6e édition de Robo-Insight, une mise à jour de la robotique! Dans cet article, nous sommes ravis de partager une gamme de nouvelles progrès dans le domaine et de mettre en évidence les progrès des robots dans des domaines tels que l’assistance médicale, les prothèses, la flexibilité des robots, le mouvement conjoint, les performances du travail, la conception d’IA et la propreté des ménages.
Robots qui peuvent aider les infirmières
Dans le monde médical, Des chercheurs d’Allemagne ont développé un système robotique conçu pour aider les infirmières à soulager la tension physique associée aux soins aux patients. Les infirmières sont souvent confrontées à des demandes physiques élevées lorsqu’elles s’occupent des patients lit, en particulier pendant les tâches comme les repositionner. Leur travail explore comment la technologie robotique peut aider à de telles tâches en ancrant à distance les patients dans une position latérale. Les résultats indiquent que le système a amélioré la posture de travail des infirmières en moyenne de 11,93% et a été considérée comme conviviale. La recherche met en évidence le potentiel de la robotique pour soutenir les soignants dans les milieux de santé, l’amélioration des conditions de travail des infirmières et des soins aux patients.
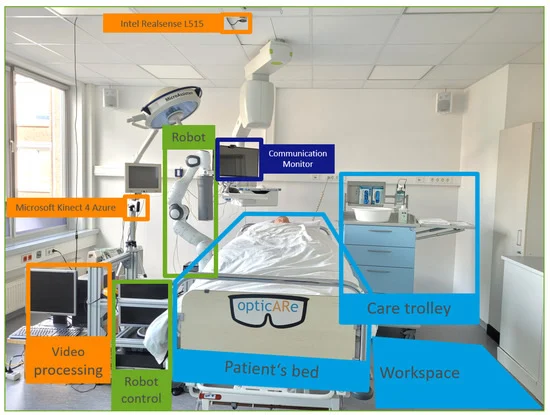
Arrangement de la salle des patients utilisé dans l’étude. Source.
Robots améliorant le contrôle des mains bionique
Garder notre concentration sur les soins de santé, récemment chercheurs de nombreuses institutions européennes ont réalisé une percée significative dans la technologie prothétique des robots, car ils ont réussi à implanter une prothèse neuromusculosquelettique, une main bionique connectée directement aux systèmes nerveux et squelettiques de l’utilisateur, chez une personne avec une amputation inférieure à la fin. Cette réalisation impliquait des procédures chirurgicales pour placer des implants de titane dans le rayon et les os ulna et transférer les nerfs coupés pour libérer des greffes musculaires. Ces interfaces neuronales ont fourni un lien direct entre la prothèse et le corps de l’utilisateur, permettant une amélioration de la fonction prothétique et une qualité de vie accrue. Leur travail démontre le potentiel de dispositifs prothétiques hautement intégrés pour améliorer la vie des amputés grâce à un contrôle neuronal fiable et à une utilisation quotidienne confortable.
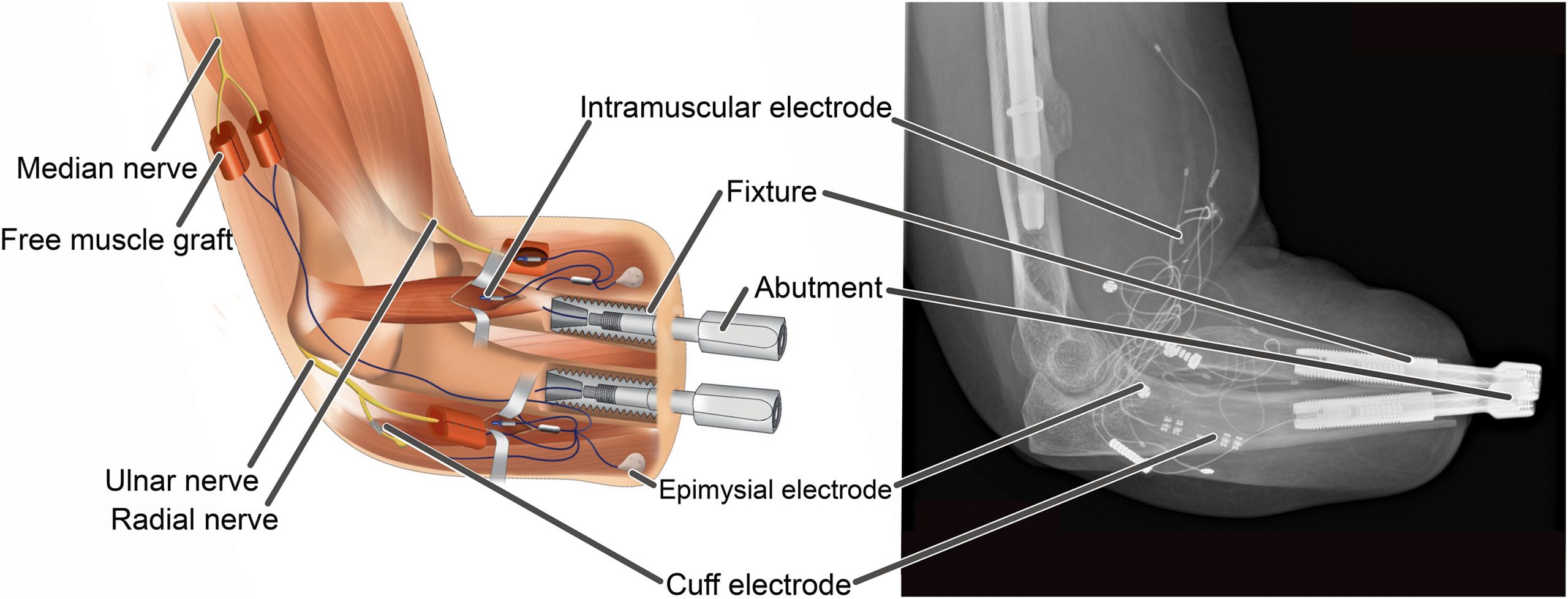
Schématique et radiographie d’une interface humaine entièrement intégrée chez un patient. Source.
Apprentissage du renforcement en robotique mous
Tourner notre objectif en robotique douce, Des chercheurs du Center for Research and Advanced Studies de l’Institut national polytechnique du Mexique et de l’Université Autónoma de Coahuila ont proposé une approche pour utiliser l’apprentissage du renforcement (RL) pour le contrôle moteur d’un robot souple modéré par un pneumatique sur les milieux de continuum avec une densité variable. Cette méthode implique un schéma acteur-critique continu conçu pour le suivi des tâches dans un robot doux 3D soumis à Lipschitz. Leur étude introduit un mécanisme de différence temporelle basé sur la récompense et une approche adaptative discontinue pour les poids neuronaux dans la composante critique du système. L’objectif global est de permettre à RL de contrôler la nature complexe, incertaine et déformable des robots mous tout en assurant la stabilité du contrôle en temps réel, une exigence cruciale pour les systèmes physiques. Cette recherche se concentre sur l’application de RL dans la gestion des défis uniques posés par les robots mous.
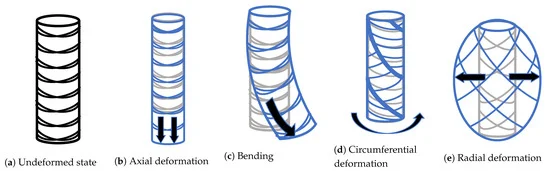
Distorsions distinctes d’un robot flexible en forme cylindrique. Source.
Un robot humanoïde de taille adolescente
Passant aux interactions humaines-robot, Des chercheurs de l’Université du Texas au laboratoire de robotique centré sur l’homme d’Austin ont introduit un robot humanoïde de taille adolescente nommé Draco 3, conçu en collaboration avec Apptronik. Ce robot, adapté à une utilisation pratique dans des environnements humains, dispose d’actionnement proximal et utilise des mécanismes de contact roulant sur son bas du corps, permettant de nombreuses poses verticales. Un contrôleur de corps entier (WBC) a été développé pour gérer les transmissions complexes de Draco 3. Cette recherche offre un aperçu du développement et du contrôle des humanoïdes avec des joints de contact roulant, en se concentrant sur la praticité et la performance.
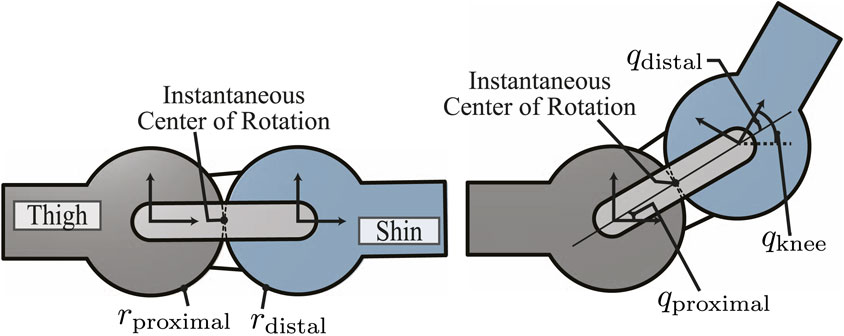
Diagramme illustrant le joint de contact roulant au genou. Configuration initiale (à gauche) et déplacement post-angulaire (à droite). Source.
Les impacts des robots sur les performances
Déplacer notre concentration vers la psychologie, Récemment des chercheurs de Technische Universität Berlin ont étudié le phénomène des plans sociaux dans les équipes de robot humain. Le pain social fait référence à une réduction des efforts individuels dans un cadre d’équipe par rapport au travail seul. L’étude a impliqué que les participants inspectent les circuits imprimés pour les défauts, un groupe travaillant seul et l’autre avec un partenaire de robot. Malgré un robot fiable qui a marqué des défauts sur les conseils d’administration, les participants travaillant avec le robot ont identifié moins de défauts par rapport à ceux qui travaillent seuls, suggérant une occurrence potentielle de puits sociaux dans les équipes de robot humain. Cette recherche met en lumière les défis associés à la collaboration humaine-robot et son impact sur l’effort individuel et les performances.
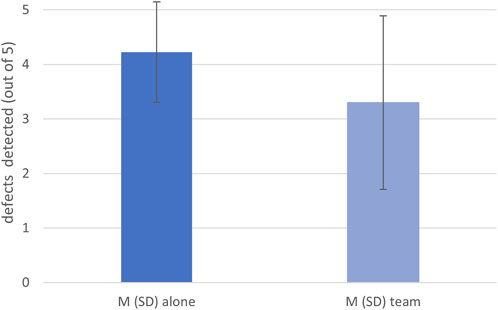
Résultats du travail en solo par rapport au travail du robot. Source.
Un robot conçu par AI
Changer notre concentration en conception de robots, Des chercheurs de la Northwestern University ont développé un système d’IA qui conçoit des robots à partir de zéro, lui permettant de créer un robot de marche en quelques secondes, une tâche qui a pris la nature des milliards d’années pour évoluer. Ce système d’IA fonctionne sur un ordinateur personnel léger, sans s’appuyer sur des supercalculateurs avides d’énergie ou de grands ensembles de données, offrant le potentiel de concevoir rapidement des robots avec des formes uniques. Le système fonctionne en itérant sur une conception, en évaluant ses défauts et en affinant la structure en quelques secondes. Il ouvre la voie à une nouvelle ère d’outils conçus par l’IA capables d’agir directement sur le monde pour diverses applications.
Robot de conception de l’imprimante 3D. Source.
Un robot personnalisable pour l’organisation ménage
Enfin, dans le domaine de la robotique à domicile, Des chercheurs de Stanford, Princeton, de l’Université Columbia et Googleont développé Tidybot, un robot à un bras conçu pour nettoyer les espaces en fonction des préférences personnelles. Tidybot utilise un grand modèle de langue formé sur les données Internet pour identifier divers objets et comprendre où les mettre, ce qui le rend hautement personnalisable à différentes préférences. Dans les tests du monde réel, le robot peut correctement ranger environ 85% des objets, améliorant considérablement l’organisation des ménages. Bien que Tidybot ait toujours place à l’amélioration, les chercheurs pensent qu’il est très prometteur pour rendre les robots plus polyvalents et utiles dans les maisons et autres environnements.

Tidybot en formation. Source.
Le développement continu dans une multitude de secteurs met en évidence la flexibilité et le caractère progressivement avancé de la technologie de la robotique, en découvrant de nouvelles possibilités pour son incorporation dans un large éventail d’industries. L’expansion progressive du domaine de la robotique reflète l’engagement inébranlable et offre un aperçu des conséquences potentielles de ces progrès pour les temps à venir.
Sources:
- Hinrichs, P., Seibert, K., Arizpe Gómez, P., Pfingsthorn, M., et Hein, A. (2023). Un système robotique pour ancrer un patient dans une position latérale et réduire la tension physique des infirmières. Robotique, 12(5)
- Ortiz-Catalán, M., Zbinden, J., Millenaar, J., D’Accolti, D., Controzzi, M., Clemente, F., Cappello, L., Earley, EJ, Enzo Mastinu, Justyna Kolankowska, Munoz-Novoa, M., Stewe Jönsson, Njel, C., Paolo Sassu, Rickard. (2023). Une main bionique hautement intégrée avec un contrôle neuronal et une rétroaction à utiliser dans la vie quotidienne. Robotique scientifique
- Pantoja-Garcia, L., Parra-Vega, V., Garcia-Rodriguez, R., et Vázquez-García, CE (2023). Un nouvel acteur – apprentissage du renforcement moteur critique pour les robots doux du continuum. Robotique, 12(5)
- Bang, SH, Gonzalez, C., Ahn, J., Paine, N., et Sentis, L. (2023, 26 septembre). Contrôle et évaluation d’un robot humanoïde avec des joints de contact roulant sur son bas. Frontières.
- Cymek, DH, Truckenbrodt, A., et Onnasch, L. (2023, 31 août). Se pencher en arrière ou s’appuyer? Explorer le pain social dans les équipes humaines-robot. Frontières.
- Évolution instantanée: AI conçoit un nouveau robot à partir de zéro en quelques secondes. (nd). News.northwestern.edu.
- Université, S. (2023, 3 octobre). Le robot fournit un nettoyage personnalisé de la pièce. Stanford News.

Shaunak Kapur
Faire partie de l’équipe de bénévolat de RoboHub et du prochain senior au lycée (Texas). Shaun a été captivé par la robotique dès son plus jeune âge.
Shaunak Kapur fait partie de l’équipe de bénévolat de RoboHub et du futur senior au lycée (Texas). Shaun a été captivé par la robotique dès son plus jeune âge.



