
Raisser la barre: ajout de hauteur et de polyvalence aux robots de manipulateur mobile
- Robotique
 Noesis News
Noesis News- 0
- 13 minutes de lecture

Les robots de manipulateur mobile deviennent de plus en plus répandus à mesure que les capteurs, les armes robotiques et les plateformes mobiles deviennent plus accessibles. Ces robots se composent généralement d’une base mobile, comme le Plateforme omnidirectionnelle Ridgebackassocié à un ou deux bras robotiques et à une suite de capteurs pour soutenir une application spécifique. En fin de compte, ces robots de type humain aident à faire progresser des domaines comme l’automatisation des entrepôts et la robotique de service, et la collaboration par l’homme-robot dans des industries comme les soins de santé et la fabrication.
Lorsque vous montez les bras sur une base mobile autonome, une hauteur de bras fixe est souvent assez bonne. Mais avec l’intérêt croissant pour la robotique humanoïde, les chercheurs et les développeurs de robots commencent à rechercher plus de flexibilité et d’adaptabilité dans le contrôle et le positionnement des bras. C’est là que les colonnes de levage télescopiques Ewellix entrent en jeu.
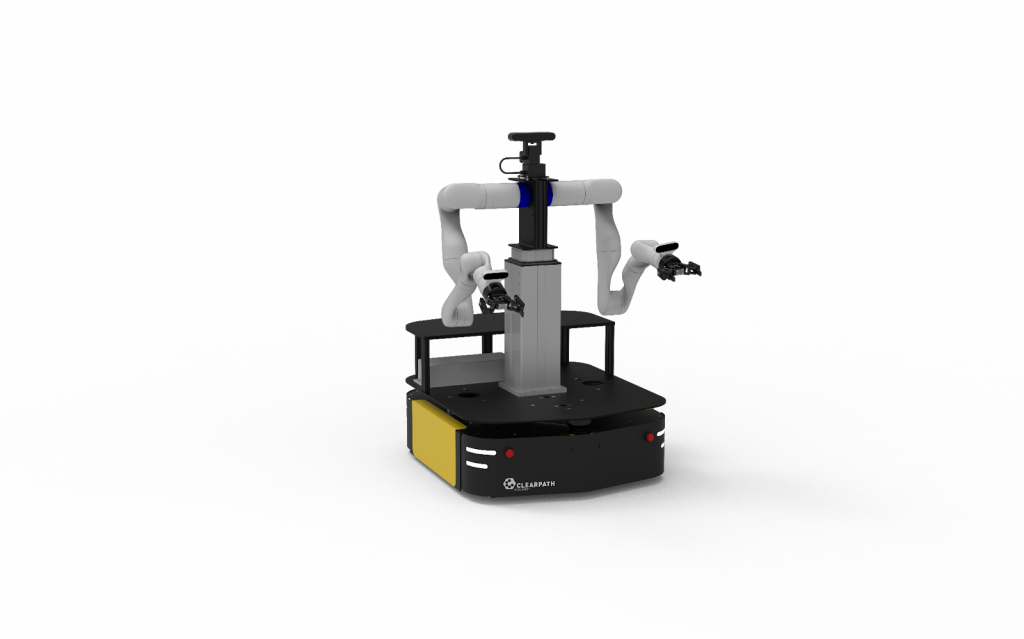
Dual Franka Research 3 bras montés sur une colonne d’ascenseur Ewillex sur une plate-forme omnidirectionnelle Ridgeback
Les ascenseurs télescopiques Ewellix apportent une précision, une force et une sécurité de qualité chirurgicale à la robotique. Conçus à l’origine pour ajuster les équipements médicaux et les patients, soutenant des charges allant jusqu’à 600 livres, ces ascenseurs aident les chirurgiens à travailler plus confortablement. Lorsqu’elle est utilisée comme base d’un bras robotique, les ascenseurs ajoutent une flexibilité supplémentaire, donnant au robot une plus grande portée et une maniabilité. Il peut même être utilisé comme base pour les capteurs, permettant à leur position d’être ajustée par programme.
Cette flexibilité accrue, combinée à la sécurité et à la fiabilité de la qualité médicale, fait des colonnes de levage télescopiques Ewellix une mise à niveau intelligente et standard pour les robots de manipulateur mobile.
Caractéristiques clés
Examinons de plus près certaines des principales caractéristiques des piliers Ewellix liés à la sécurité, aux performances et à l’intégration des logiciels.
Sécurité et protection
L’unité de contrôle est conforme à la norme IEC 60601-1 pour les applications médicales, peut être incorporée dans la boucle de pointe de l’urgence d’un robot et a surcharger une protection sur-température.
Différentes hauteurs et longueur de course
La gamme Ewellix de colonnes de levage a cinq hauteurs et longueurs différentes. Les piliers sont disponibles avec les longueurs de course suivantes: 300, 400, 500, 600, 700 mm.
Charge et vitesse
Il y a également cinq profils de charge et de vitesse poussées différents à choisir en fonction de la charge utile:
- A1: 3000n, 11 à 16 mm / s
- A2: 4000N, 13 à 19 mm / s
- B1: 2000n, 13 à 19 mm / s
- C1: 1000N, 25 à 36 mm / s
- C2: 2000n, 25 à 42 mm / s
Contrôle externe
Alors que chaque ascenseur contient 2 actionneurs, l’unité de contrôle Ewellix SCU dispose d’une interface de série RS232 pour contrôler 6 actionneurs possibles (pour un total de trois ascenseurs). En utilisant cette interface, l’état actuel et les commentaires d’erreur de chaque actionneur peuvent être récupérés.
Intégration ROS
Pour faciliter le développement de logiciels avec le pilier Ewellix TLT, ClearPath Robotics fournit des bibliothèques, des nœuds et des plugins open source.
- ROS 1 Noetic
Il y a quelques années, nous avons étendu un pilote open source existant écrit par nos partenaires à Robotique de génération Pour inclure Moveit! Prise en charge en implémentant un serveur d’action de trajectoire conjoint. Vous pouvez trouver notre chauffeur modifié sur le public Référentiel Github de ClearPath Robotics. - Ros 2 Humble et Jazzy
Au fur et à mesure que nous avons migré vers ROS 2, nous avons réinventé l’ensemble du conducteur pour faciliter le développement et la personnalisation ultérieurs. Le ROS 2 EWELLIX Driver est open source et peut être utilisé librement et modifié. - Bibliothèque série Ewellix
À la base, le pilote contient une bibliothèque C ++ qui expose toute la communication série pour interagir directement avec l’ascenseur. La bibliothèque peut être utilisée pour construire un nœud ROS 2 personnalisé, et nous fournissons un exemple de nœud pour les développeurs pour commencer. - Interface matérielle Ewellix
Dans ROS 2, il est devenu standard pour que tous les contrôleurs soient mis en œuvre en utilisant le ROS2_CONTROL cadre. À cette fin, nous avons implémenté un plugin d’interface matérielle qui expose l’interface de commande de position de l’ascenseur pour permettre à l’utilisation des contrôleurs de position et des contrôleurs de trajectoire conjoint. - Simulation d’échantillon d’Ewellix
De plus, nous avons mis en place un échantillon de simulation de gazebo pour commencer avec l’ascenseur. Pour l’essayer vous-même, suivez le instructions dans le référentiel.
Exemple de configurations de manipulateur mobile
Manipulateur mobile Kinova Gen3 à double bras
Dans le passé, nous avons mis en évidence un assistant de laboratoire de robot composé d’une base mobile Clearpath Ridgeback, d’un pilier Ewellix TLT 1500N, d’un pilier de 500 mm et d’armes collaboratives à double Kinova Gen3 avec Robotiq 2F 85. Le robot était en outre équipé de caméras de profondeur aux poignets du bras, d’une caméra stéréolabs Zed 2 et d’un lidar OS1 d’éviction. Pour en savoir plus sur ce robot, visitez notre article de blog Explorer l’interaction des robots humains: Ridgeback optimise les opérations de laboratoire.
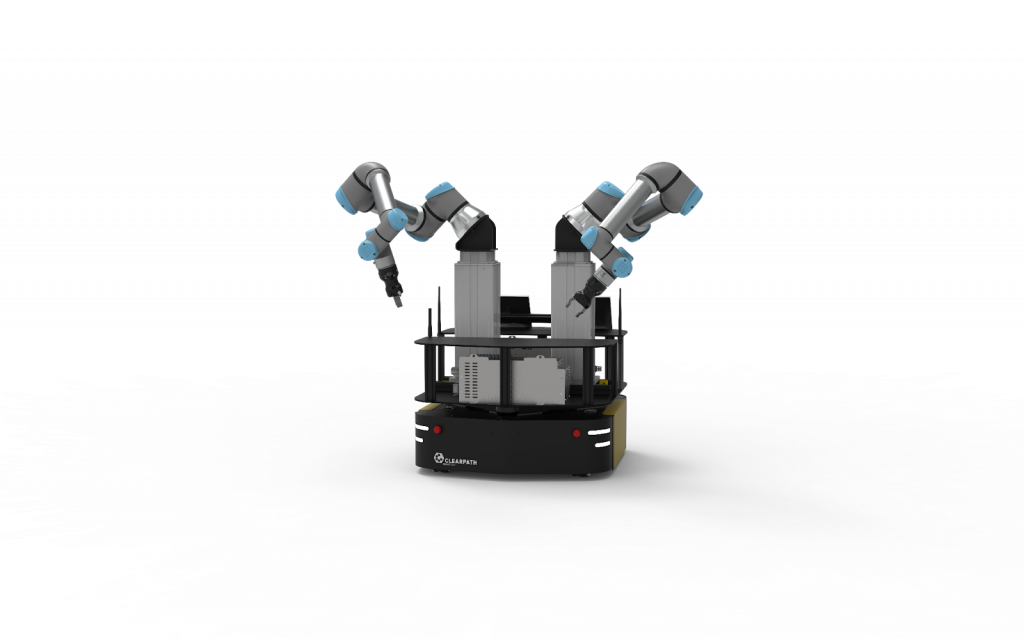
Manipulateur mobile Dual Ur5e
La plate-forme mobile Ridgeback prend en charge une variété de bras et de configurations différents. La configuration ci-dessous comprend deux manipulateurs UR5E, chacun avec un ascenseur dédié qui permet un contrôle indépendant complet du positionnement de hauteur pour chaque bras.
Conclusion
Alors que la manipulation mobile continue d’évoluer, la capacité d’ajuster dynamiquement la hauteur d’un bras devient un facteur critique pour élargir ses capacités. En intégrant les colonnes de levage d’Ewellix, les robots de manipulateur mobile obtiennent un degré de flexibilité supplémentaire, leur permettant d’interagir plus efficacement avec leur environnement – que ce soit pour des tâches industrielles précises, des espaces de travail collaboratifs ou des applications de recherche avancées. Avec des fonctionnalités de sécurité robustes, des configurations personnalisables et une intégration de ROS sans couture, le système de levage Ewellix fournit une solution fiable et standard pour améliorer la robotique mobile.
Apprendre encore plus
Vous cherchez à améliorer votre manipulateur mobile avec une plus grande flexibilité et précision? Contactez notre équipe Pour en savoir plus sur les colonnes de levage d’Ewellix et explorez la meilleure solution pour votre prochain projet de robotique. Cliquez ici Pour en savoir plus sur la plate-forme mobile omnidirectionnelle Ridgeback.



