
L’outil de formation 3-en-1 du MIT assouplit l’apprentissage des robots
- Intelligence Artificielle
 Noesis News
Noesis News- 0
- 12 minutes de lecture
Enseigner un robot de nouvelles compétences utilisées pour nécessiter une expertise de codage. Mais une nouvelle génération de robots pourrait potentiellement apprendre de n’importe qui.
Les ingénieurs conçoivent des aides robotiques qui peuvent «apprendre de la démonstration». Cette stratégie de formation plus naturelle permet à une personne de diriger un robot à travers une tâche, généralement de l’une des trois manières: via la télécommande, comme faire fonctionner un joystick pour manœuvrer à distance un robot; en déplaçant physiquement le robot à travers les mouvements; ou en effectuant la tâche elles-mêmes pendant que le robot regarde et imite.
Les robots d’apprentissage par le fait s’entraînent généralement dans une seule de ces trois approches de démonstration. Mais les ingénieurs du Massachusetts Institute of Technology (MIT) ont maintenant développé une interface de formation trois en un qui permet à un robot d’apprendre une tâche grâce à l’une des trois méthodes de formation. L’interface est sous la forme d’un outil portable et équipé de capteurs qui peut s’attacher à de nombreux bras robotiques collaboratifs. Une personne peut utiliser l’attachement pour enseigner à un robot pour effectuer une tâche en contrôlant à distance le robot, en le manipulant physiquement ou en démontrant la tâche elle-même – quel que soit le style qu’elle préfère ou convient le mieux à la tâche à accomplir.
L’équipe du MIT a testé le nouvel outil, qu’ils appellent une «interface de démonstration polyvalente», sur un bras robotique collaboratif standard. Des bénévoles ayant une expertise manufacturière ont utilisé l’interface pour effectuer deux tâches manuelles qui sont généralement effectuées sur les planchers d’usine.
Les chercheurs disent que la nouvelle interface offre une flexibilité de formation accrue qui pourrait étendre le type d’utilisateurs et les «enseignants» qui interagissent avec les robots. Il peut également permettre aux robots d’apprendre un ensemble plus large de compétences. Par exemple, une personne pourrait former à distance un robot pour gérer les substances toxiques, tandis que plus la chaîne de production, une autre personne pourrait physiquement déplacer le robot à travers les mouvements de la boxe d’un produit, et à la fin de la ligne, quelqu’un d’autre pourrait utiliser l’attachement pour dessiner un logo d’entreprise alors que le robot montre et apprend pour faire de même.
« Nous essayons de créer des coéquipiers très intelligents et qualifiés qui peuvent efficacement travailler avec les humains pour faire un travail complexe », a déclaré Mike Hagenow, un post-doctorant au MIT du Département d’aéronautique et d’astronautique. «Nous pensons que les outils de démonstration flexibles peuvent aider bien au-delà de l’étage de fabrication, dans d’autres domaines où nous espérons voir une adoption accrue des robots, tels que des paramètres à domicile ou à la prestation de soins.»
Hagenow présentera un papier détaillant la nouvelle interfacelors de la conférence IEEE Intelligent Robots and Systems (IROS) en octobre. Les co-auteurs du MIT du journal sont Dimosthenis Kontogiorgos, un post-doctorant au MIT Computer Science and Artificial Intelligence Lab (CSAIL); Yanwei Wang PhD ’25, qui a récemment obtenu un doctorat en génie électrique et en informatique; et Julie Shah, professeur du MIT et chef du département d’aéronautique et d’astronautique.

L’appareil portable développé par le MIT qui peut être utilisé pour enseigner à un robot de nouvelles compétences. | Crédit: MIT
Formation ensemble
Le groupe de Shah au MIT conçoit des robots qui peuvent fonctionner aux côtés des humains sur le lieu de travail, dans les hôpitaux et à la maison. Un objectif principal de ses recherches est le développement de systèmes qui permettent aux gens d’enseigner aux robots de nouvelles tâches ou compétences «au travail», pour ainsi dire. De tels systèmes aideraient, par exemple, un travailleur d’usine rapidement et à ajuster naturellement les manœuvres d’un robot pour améliorer sa tâche dans le moment, plutôt que de s’arrêter pour reprogrammer le logiciel du robot à partir de zéro – une compétence qu’un travailleur n’a pas nécessairement.
Le nouveau travail de l’équipe s’appuie sur une stratégie émergente dans l’apprentissage des robots appelée «Apprentissage de la démonstration» ou LFD, dans lequel les robots sont conçus pour être formés de manière plus naturelle et intuitive. En parcourant la littérature LFD, Hagenow et Shah ont trouvé que les méthodes de formation LFD développées jusqu’à présent tombent généralement dans les trois principales catégories de téléopération, de formation kinesthésique et d’enseignement naturel.
Une méthode de formation peut fonctionner mieux que les deux autres pour une personne ou une tâche en particulier. Shah et Hagenow se sont demandé s’ils pouvaient concevoir un outil qui combine les trois méthodes pour permettre à un robot d’apprendre plus de tâches de plus de personnes.
« Si nous pouvions rassembler ces trois façons différentes, quelqu’un pourrait vouloir interagir avec un robot, cela peut apporter des avantages pour différentes tâches et différentes personnes », a déclaré Hagenow.
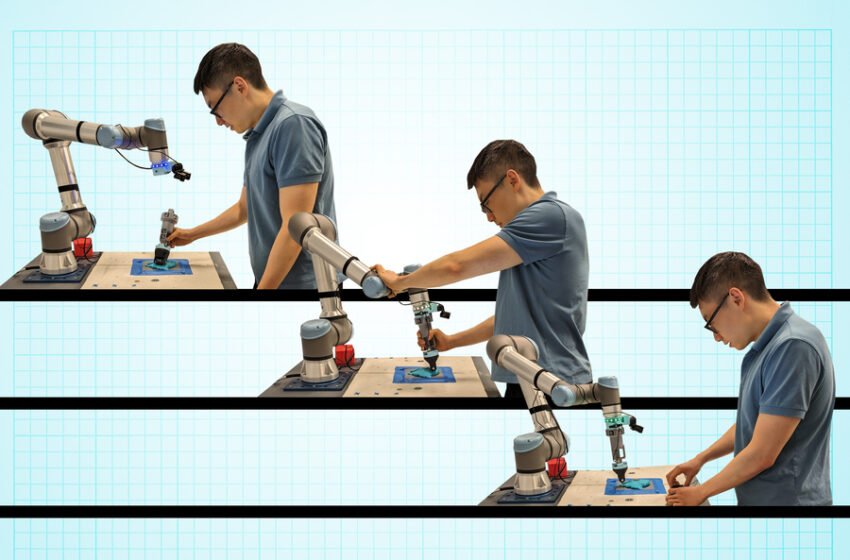
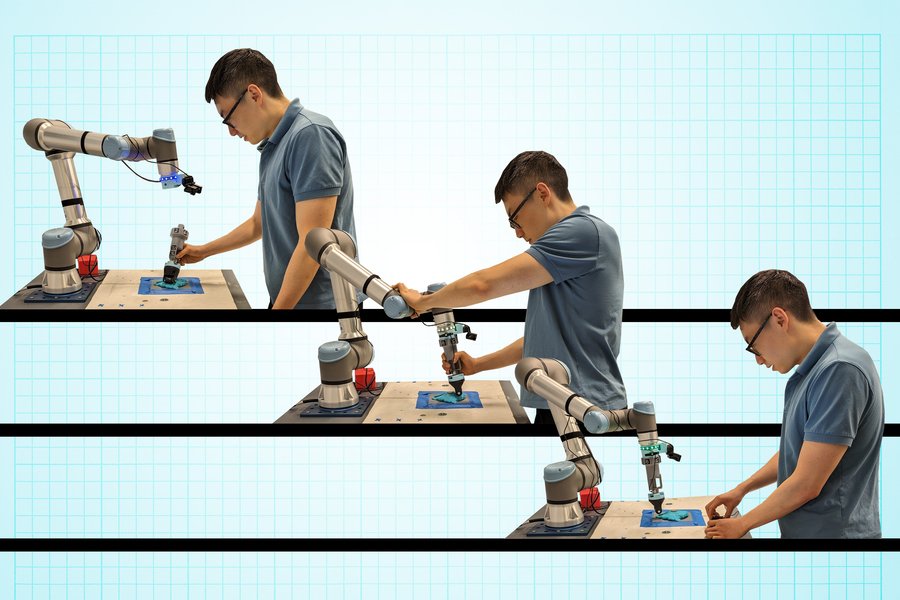
Le MIT a développé une interface portable qui vous permet d’enseigner un robot de nouvelles compétences, en utilisant l’une des trois approches de formation: enseignement naturel (haut à gauche), formation kinesthésique (milieu) et téléopération. | Crédit: MIT
Tâches à portée de main
Avec cet objectif à l’esprit, l’équipe a conçu une nouvelle interface de démonstration polyvalente (VDI). L’interface est une pièce jointe portative qui peut s’adapter sur le bras d’un bras robotique collaboratif typique. La fixation est équipée d’une caméra et de marqueurs qui suivent la position et les mouvements de l’outil au fil du temps, ainsi que des capteurs de force pour mesurer la quantité de pression appliquée pendant une tâche donnée.
Lorsque l’interface est attachée à un robot, l’ensemble du robot peut être contrôlé à distance et la caméra de l’interface enregistre les mouvements du robot, que le robot peut utiliser comme données de formation pour apprendre la tâche par lui-même. De même, une personne peut déplacer physiquement le robot à travers une tâche, avec l’interface attachée. Le VDI peut également être détaché et détenu physiquement par une personne pour effectuer la tâche souhaitée. La caméra enregistre les mouvements du VDI, que le robot peut également utiliser pour imiter la tâche lorsque le VBI est remis.
Pour tester la convivialité de l’attachement, l’équipe a apporté l’interface, ainsi qu’un bras robotique collaboratif, à un centre d’innovation local où les experts manufacturiers apprennent et testent la technologie qui peut améliorer les processus d’étage d’usine. Les chercheurs ont mis en place une expérience où ils ont demandé aux bénévoles du centre d’utiliser le robot et les trois méthodes de formation de l’interface pour effectuer deux tâches de fabrication courantes: l’ajustement et la moulure. Dans l’ajustement de la presse, l’utilisateur a formé le robot pour appuyer et ajuster les chevilles dans des trous, similaires à de nombreuses tâches de fixation. Pour le moulage, un volontaire a formé le robot pour pousser et rouler une substance caoutchouteuse et semblable à la pâte autour de la surface d’une tige centrale, similaire à certaines tâches thermomoldantes.
Pour chacune des deux tâches, les volontaires ont été invités à utiliser chacune des trois méthodes de formation, à téléopération d’abord le robot en utilisant un joystick, puis à manipuler kinesthétique le robot, et enfin, le détachant de l’attachement du robot et l’utilisant pour effectuer «naturellement» la tâche pendant que le robot enregistrait la force et les mouvements de l’attachement.
Les chercheurs ont constaté que les volontaires préféraient généralement la méthode naturelle à la téléopération et la formation kinesthésique. Les utilisateurs, qui étaient tous des experts de la fabrication, ont proposé des scénarios dans lesquels chaque méthode pourrait avoir des avantages par rapport aux autres. La téléopération, par exemple, peut être préférable à la formation d’un robot pour gérer les substances dangereuses ou toxiques. La formation en kinesthésique pourrait aider les travailleurs à ajuster le positionnement d’un robot chargé de déplacer des forfaits lourds. Et l’enseignement naturel pourrait être bénéfique pour démontrer des tâches qui impliquent des manœuvres délicates et précises.
«Nous imaginons utiliser notre interface de démonstration dans des environnements de fabrication flexibles où un robot pourrait aider à travers une gamme de tâches qui bénéficient de types spécifiques de démonstrations», a déclaré Hagenow, qui prévoit d’affiner la conception de la pièce jointe en fonction des commentaires des utilisateurs et utilisera la nouvelle conception pour tester l’apprentissage du robot. «Nous considérons cette étude comme démontrant à quel point la flexibilité des robots collaboratives peut être réalisée grâce à des interfaces qui élargissent les façons dont les utilisateurs finaux interagissent avec les robots pendant l’enseignement.»
Note de l’éditeur: Cet article a été republié à partir de NOUVELLES MIT.
Source link



