
Dusty Robotics Designs Robot Fieldprinter 2 avec contrôleurs de mouvement PMD
- Intelligence Artificielle
 Noesis News
Noesis News- 0
- 15 minutes de lecture
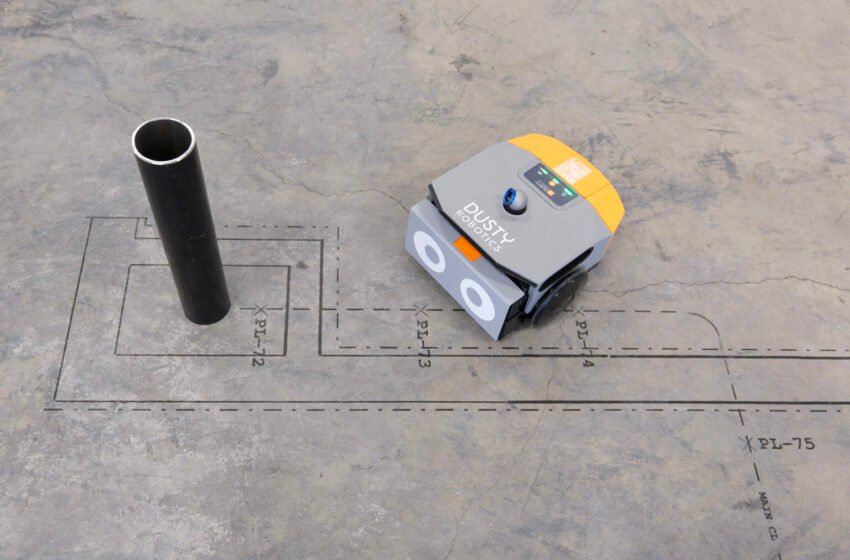

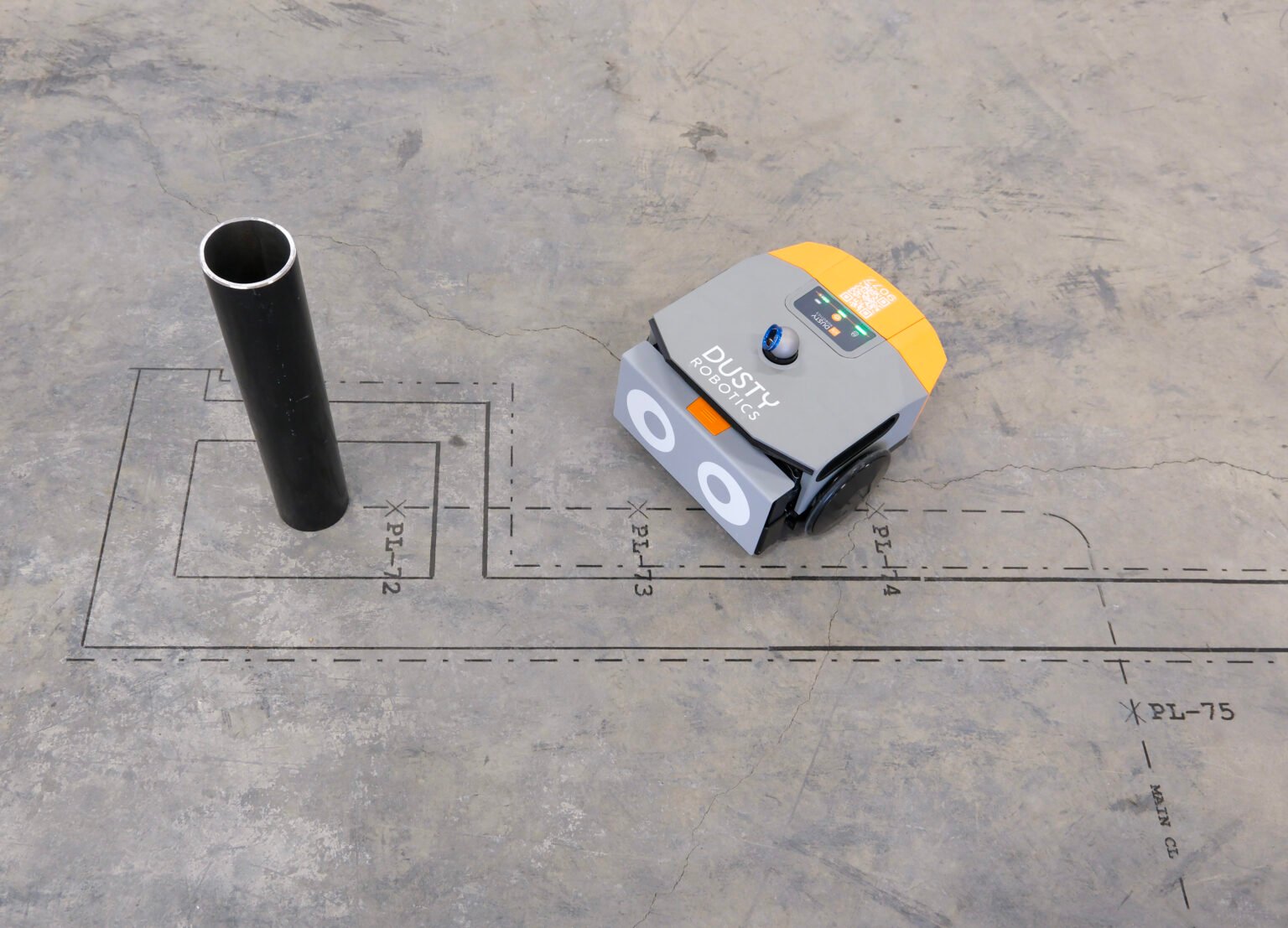
Les dispositifs de contrôleur de mouvement des dispositifs de mouvement de performance des dispositifs de la série N aident l’AMR poussiéreux à éviter les obstacles, les rebords et autres dangers. | Source: Robotique poussiéreuse
L’industrie de la construction est sous pression. Les pénuries de main-d’œuvre, la hausse des coûts des matériaux et la demande de vitesse et de précision poussent les constructeurs à rechercher des solutions automatisées qui renforcent l’efficacité, la sécurité et la durabilité. Dusty Robotics espère utiliser sa technologie pour changer cela.
Dans la plupart des cas, les plans sont marqués dans des espaces physiques en utilisant des moyens à l’ancienne: selon le site, le personnel peut utiliser un station totale (un instrument d’arpentage intégrant plusieurs outils de mesure) ou peut-être simplement des mesures de ruban et des lignes de craie pour marquer où les choses vont. L’approche largement inchangée par rapport aux personnes utilisées il y a des siècles.
D’énormes piles de copies durs Blueprint détaillant chaque étage et système cédent lentement aux communications numériques, mais les informations sont toujours communiquées sur place manuellement, a expliqué Mike Thompson, ingénieur principal chez Dusty Robotics. Trop souvent, le modèle 3D d’un bâtiment n’est pas ce qui est construit. Alors que divers métiers disposent de leurs plans, des erreurs et des informations obsolètes conduisent souvent à des dispositions, des retouches et des retards incorrects.
Dusty Robotics conçoit le Fieldprinter 2
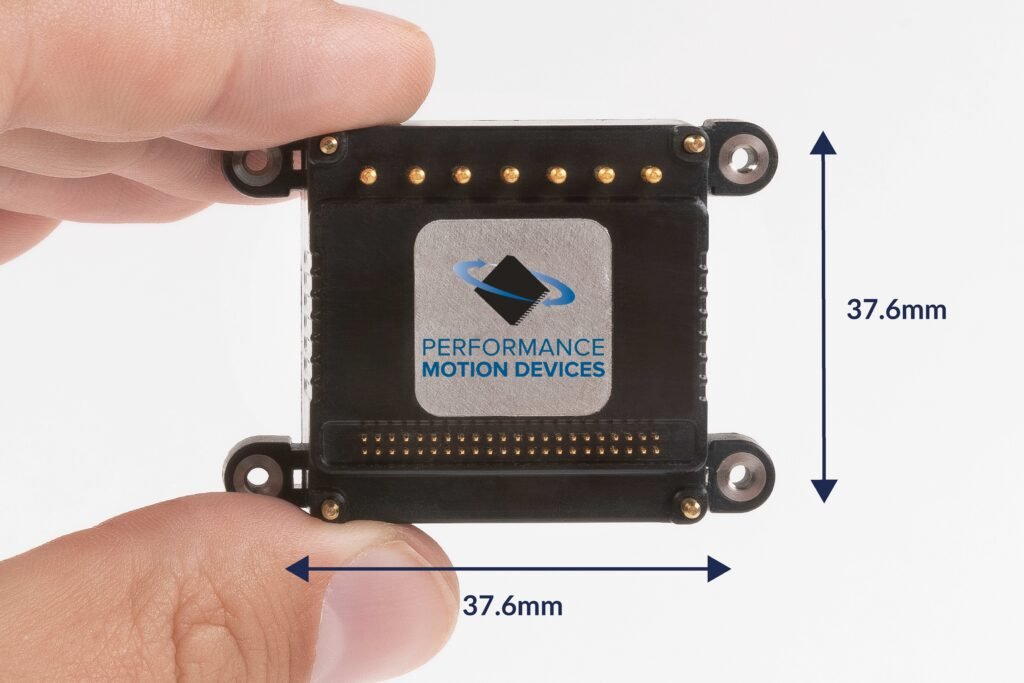
Le lecteur de contrôle de mouvement ION / CME N-Series confère la conception poussiéreuse avec le contrôle nécessaire pour un fonctionnement automatisé précis. | Source: Dispositifs de mouvement de performance
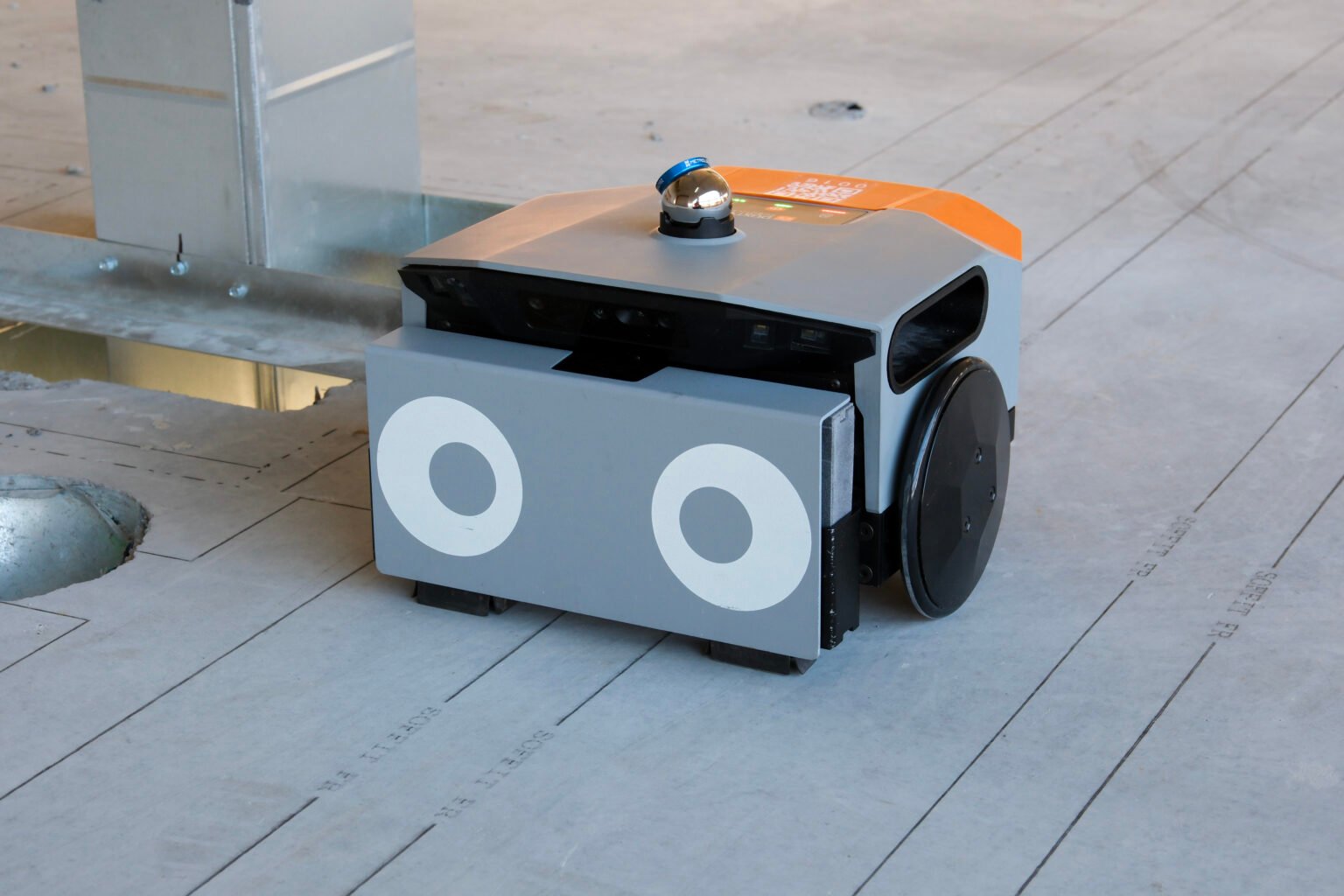
La startup de Mountain View, en Californie, Dusty Robotics a conçu un robot mobile autonome (AMR) a appelé le Fieldprinter 2 à la carte indépendante et à marquer les conceptions de construction 3D sur 2D construction étages avec 0,0625 pouce. précision. Avec lui, les équipes de construction n’ont plus à vérifier constamment leurs ordinateurs portables, iPad et plans papier pour savoir ce qui doit être construit et où.
Le cœur de la fonction de l’AMR est deux contrôle des mouvements composants des dispositifs de mouvement de performance (PMD). Le Ion / CME N-Series Les disques fournissent le contrôle et l’alimentation des deux roues avant de l’AMR, et plus précisément, les deux moteurs électriques CC sans balais (BLDC) conduisant les roues. La roue arrière de l’AMR n’a pas de conduite active.
Le contrôleur entraîne le robot, ainsi qu’une suite de capteurs qui fournissent des informations de localisation précises, y compris les trackers, les encodeurs et les gyroscopes de l’unité de mesure inertielle.
« Nous voulons un mouvement continu entre tous les objets que nous imprimons », a déclaré Ryan Dimick, l’ingénieur contrôle de Dusty Robotics. Le système doit permettre des changements de profil constant car le robot bascule entre la navigation et l’impression. »
En fait, le nouveau FieldPrinter 2 AMR améliore une itération précédente à l’aide des disques de contrôleur PMD. L’utilisation par la première itération des contrôleurs de mouvement d’un autre fournisseur a créé des défis pour le démarrerLes développeurs, y compris l’incapacité à comprendre et à rectifier les erreurs sans solution de contournement. La nouvelle solution de conduite de contrôleur aborde ces problèmes et s’inscrit dans la plate-forme existante.
Plus précisément, le contrôleur à axe unique mentable PCB confère un contrôle de mouvement haute performance, une connectivité réseau et une amplification pour un lecteur tout-en-un avec un processeur intégré. Ainsi, le robot peut télécharger et exécuter du code. De plus, les disques de contrôleur offrent une visibilité et une personnalisation de la robotique poussiéreuse.
« Lorsque nous avons rencontré un problème, c’était toujours quelque chose que nous pouvions corriger », a déclaré Dimick. «Nous avons surmonté toutes les latences que nous avions dans le passé et avons vraiment établi nos propres caractéristiques de synchronisation pour les moteurs et le contrôle des moteurs.»
Par exemple, Dusty voulait pouvoir modifier la boucle de commande et les paramètres de boucle de contrôle axés sur le champ, a-t-il ajouté.
« (Dimick) tire constamment des données dans les feuilles de calcul, le représente et regarde toutes les entrées et sorties vers le contrôleur de moteur – et comprenant les petits ajustements dont nous avons besoin », a expliqué Thompson. « Cette capacité à aligner les graphiques avec ses attentes – c’était un grand défi auparavant. »
Dimick a ajouté: «Nous travaillons sur une échelle de temps de niveau en millisecondes. Il est important d’obtenir des informations très rapidement pour tous les accords de réglage et de haut niveau, et nous n’avons pas pu l’atteindre avant PMD.»
Le lecteur de contrôle de mouvement Ion / CME de la série N de PMD est déterminant de la précision de la position du robot. Les lecteurs de la série N de PMD donnent également aux ingénieurs accès aux paramètres de contrôle internes pour personnaliser et dépanner la conception. | Source: Robotique poussiéreuse
PMD aide Dusty à résoudre les cas de bord
Dusty Robotics a collaboré étroitement avec le fournisseur de conduite de contrôleur pour résoudre les défis. « Chaque fois que j’intégrais le contrôleur dans le produit et que j’avais des questions, ils ont rapidement sauté sur un appel, et ils ont même publié une version de débogage personnalisée pour que je puisse utiliser temporairement pour diagnostiquer un problème », a déclaré Dimick.
Cette collaboration a également informé le choix de communication industrielle du fabricant AMR.
Le contrôleur Drive prend en charge la communication via Ethernet, CAN, RS-232, RS-485 et interface périphérique série. Dusty voulait que certaines communications arrivent dans une version légèrement ultérieure de la conduite de contrôleur.
« Donc, nous avons attendu, et je pense que nous avons été l’un des premiers à vraiment l’utiliser », se souvient-il. «Ensuite, nous avons aidé (le fournisseur) à déboguer le firmware, et ils ont rapidement retourné de nouvelles versions à utiliser.»
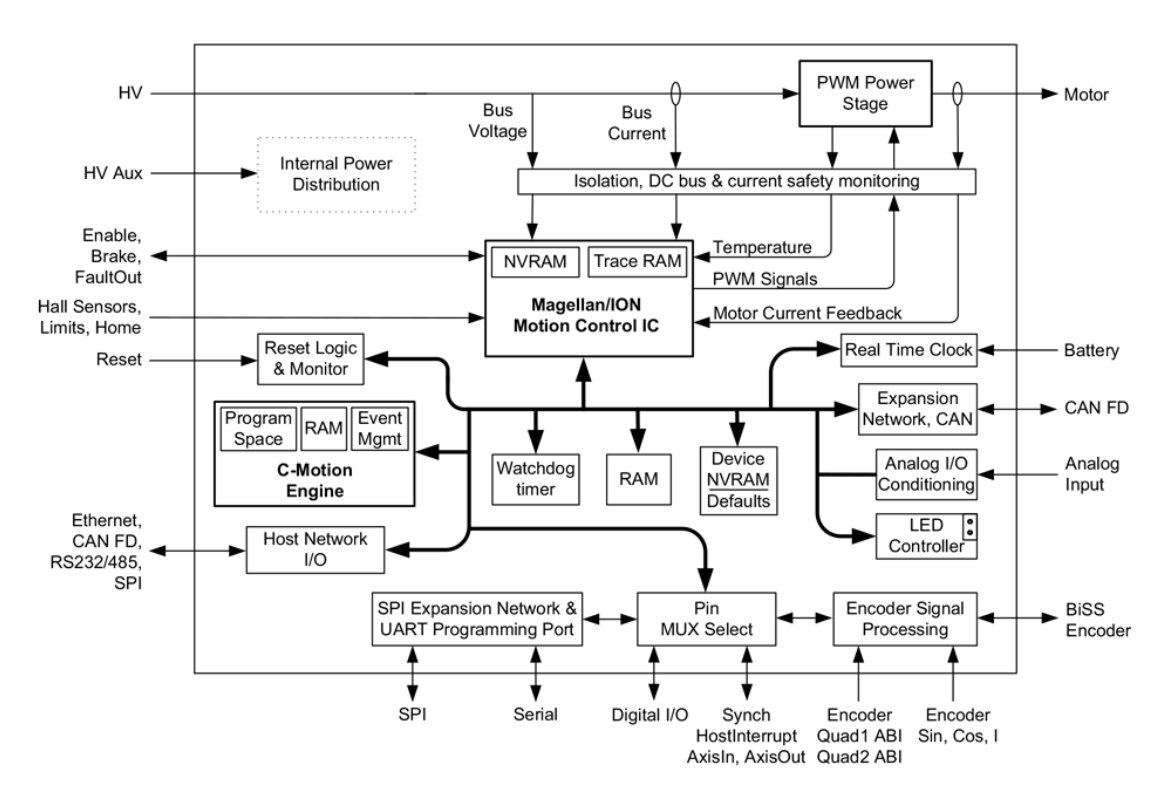
Un diagramme noir de l’ion de la série N PMD. | Source: Dispositifs de mouvement de performance
Le Dusty Fieldprinter 2 a un tracker laser qui rapporte continuellement la position AMR – mais souvent le tracker n’a pas de vue du robot, donc l’opération est aveugle. Mais le dispositif de contrôleur (en conjonction avec les capteurs du robot) maintient l’AMR sur la bonne voie.
« Lorsque le robot imprime dans un angle mort, non visible pour le tracker, il s’appuie sur l’unité de mesure inertielle et les encodeurs qui traversent le contrôleur. Il compose sur tous les autres capteurs pour cinq, 10, 15 secondes d’impression continue », a expliqué Thompson. « Ensuite, quand il sort de l’angle mort, il indique au tracker exactement où il se trouve. Nous devons donner à ce tracker la précision afin qu’il puisse acquérir très rapidement et précisément le signal. »
Ici, la précision de synchronisation de moins de millisecondes aide l’AMR à gérer les angles morts si courants chez les chances encombrées. « Cette information et un mouvement prévisible en douceur permet à l’AMR d’estimer avec précision son emplacement et de continuer à imprimer sans point de vue au tracker laser », a déclaré Dimick. Cette impression de point mort est la plus grande amélioration de la nouvelle version AMR.
La conduite de contrôleur peut également appliquer un frein électronique aux moteurs de l’AMR. Un peu de logiciel de Dusty, fonctionnant sur l’une des puces du contrôleur, sert de chien de garde. S’il perd la communication avec le robot, il alimente les moteurs.
Comme l’indique le nom de l’entreprise, le système de robotique poussiéreux doit fonctionner dans des environnements sales et par temps de temps – sous le soleil de l’Arizona, ainsi que le 14e étage d’un bâtiment de Chicago en construction lorsqu’il est de -20 ° F – et avec des obstacles inconnus et une connectivité Internet tachetée.
Contrairement aux solutions concurrentes qui laissent l’électronique sensible exposée, PMD a déclaré que la conduite de contrôleur utilisée dans FieldPrinter 2 est livrée avec un ensemble fermé pour protéger les composants internes. Les itérations futures du robot pourraient voir des niveaux d’intégration plus élevés.
« PMD nous fournit une voie », a déclaré Thompson. «Ils fournissent les contrôleurs eux-mêmes et peuvent ouvrir leurs contrôleurs et nous donner accès aux pièces indépendantes pour nous permettre de créer une solution hautement intégrée.»
« C’est quelque chose que nous n’avons pas vraiment poursuivi, mais nous permet de préserver l’investissement que les ingénieurs ont fait … et de rendre le système plus rapide et plus léger qu’aujourd’hui », a-t-il ajouté.
À propos de l’auteur

Chuck Lewin est le fondateur et PDG de Performance Motion Devices. Lancé en 1992, PMD est basé près de Boston. Il s’agit d’un développeur de la technologie de contrôle des mouvements pour les sciences de la vie, la robotique et l’automatisation industrielle. PMD offre une large gamme de produits de contrôle de mouvement électronique avancés, notamment des circuits intégrés, des amplificateurs numériques, des lecteurs numériques et des planches à une clientèle mondiale.
Note de l’éditeur: Cet article a été syndiqué à partir de Le rapport robot site de frère, Conseils de contrôle de mouvement.
Source link



