
Commission virtuelle Unleashed: Unimore avec Robodk
- Robotique
 Noesis News
Noesis News- 0
- 13 minutes de lecture
La mise en service virtuelle devient un outil clé pour ajouter des robots à votre processus de fabrication. Mais le matériel fragmenté peut vous retenir… c’est ce que le projet Penelope à Unimore adresse.
La montée Commission virtuelle n’est pas une surprise pour nous chez Robodk – nous avons fait la promotion de l’utilisation de la technologie de simulation pour le déploiement des robots au cours de la dernière décennie!
Un défi persistant dans le déploiement des robots est le manque d’intégration cohésive entre les composants matériels. Un exemple est la fragmentation entre les contrôleurs logiques programmables (PLC) et les contrôleurs de robot.
S’adressant à ce défi critique, les chercheurs d’Unimore utilisent Robodk pour combler l’écart dans le cadre du projet Penelope à l’échelle de l’Europe.
Présentation… Unimore et Penelope
Ce projet Robodk implique des chercheurs de l’Université de Modène et de Reggio Emilia (Unimore) dans son Département des sciences et des méthodes d’ingénierie (DISMI).
Inutile
Le Université de Modène et Reggio Emilia À Modène, l’Italie est à l’avant-garde du mélange des principes d’ingénierie avec des applications pratiques. Une partie de la mission de recherche dans Dismi est Transférer des connaissances de la recherche dans la société civile et le paysage commercial.
Pénélope
Le Projet Penelope est une initiative ambitieuse financée par le programme européen Horizon 2020. Il est soutenu par un réseau collaboratif d’entreprises partenaires spécialisée dans la durabilité, l’automatisation et d’autres technologies de fabrication.
Le projet vise à révolutionner le secteur manufacturier grâce au développement d’un pipeline numérique en boucle fermée. L’intégration des robots industriels dans ce pipeline numérique.
Le défi: coordination des PLC et des contrôleurs de robots
Un défi commun lors du déploiement de systèmes robotiques est la fragmentation entre les composants matériels. Ce manque de normalisation complique souvent le processus d’intégration des technologies robotiques – en fait, la résolution de ce problème est l’un de nos principaux moteurs de Robodk.
Les chercheurs d’Unimore ont identifié une combinaison particulière de matériel qui est souvent un défi: les PLC et les contrôleurs de robots.
Dans cette recherche, l’équipe a noté qu’une coordination efficace entre ces deux composantes est essentielle. Les fabricants sont souvent sous pression pour réduire leur temps sur le marché. Cependant, l’intégration peut être difficile et longue lorsque les composants sont fabriqués par différentes marques.
L’équipe s’est concentrée sur la création d’une méthode unifiée et d’un flux de travail logiciel pour simuler des systèmes robotiques multimarques.
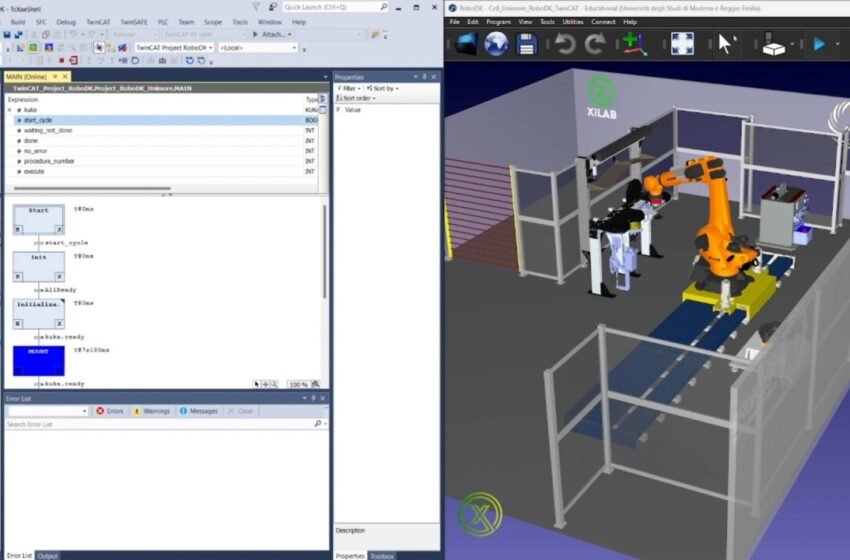
Le système: Robodk, Kuka et Twincat
La solution créée par les chercheurs combine quelques composants matériels et logiciels de base dans un seul système intégré:
Les composants matériels
Les composants matériels de base comprennent:
- Kuka KR210 R2700 Prime Robot – Ce robot industriel polyvalent de Kuka fournit le matériel robotique de base pour la solution.
- Entrepôt d’outils – L’entrepôt d’outils offre un espace organisé et un accès rapide à plusieurs outils pour les différentes étapes du processus de production.
- Outil de broche – Pour les opérations d’usinage, telles que le déburlateur, la broche a été utilisée pour l’application de cas de test de l’équipe.
Les composants logiciels
Les composants logiciels de base du système comprennent:
- Robodk Robot Simulator – Au centre de cette solution se trouve Robodk. En plus de ses puissantes capacités de programmation et de simulation hors ligne, Robodk a fourni des fonctionnalités clés pour permettre la compatibilité des composants multimarques.
- Beckhoff Twincat – Utilisation pour le développement de PLC, Twincat fournit une plate-forme pour créer des programmes industriels et gérer l’échange de données.
- Connecteur ROS2 – L’équipe a également développé une version améliorée du système qui utilise le système d’exploitation du robot (ROS) en tant que coordinateur du système.
- Pont de communication Python – L’équipe a développé un pont de communication en utilisant le langage de programmation Python pour gérer la synchronisation des signaux d’E / S en temps réel entre Robodk et le PLC à l’aide de Twincat.
5 avantages et impacts potentiels de la solution de l’équipe
La solution proposée par l’équipe d’Unimore offre plusieurs avantages potentiels aux fabricants qui cherchent à déployer des solutions d’automatisation multibrands, notamment:
- Efficacité améliorée – La création d’un seul système combiné pour la communication PLC et Robot signifie que l’équipe a rendu le déploiement de robots plus rationalisé et plus efficace.
- Réduction des coûts – La mise en service virtuelle via Robodk et le système réduit le coût de l’intégration du robot en permettant aux ingénieurs d’optimiser leur simulation, ce qui réduit les temps d’arrêt.
- Accéléré du temps de marché – En rationalisant la coordination entre les contrôleurs de PLC et Robot, le système peut accélérer le temps de commercialiser de nouvelles solutions.
- Amélioration de la flexibilité – Se concentrer sur les solutions d’automatisation multibrands est une décision puissante car elle relève le défi de base de l’interopérabilité qui peut souvent être un défi pour les ingénieurs d’automatisation.
- Applications plus larges – L’application de test pour cette mise en œuvre était le déburricité d’un composant en fonte. Cependant, il peut s’appliquer à de nombreuses autres applications. L’équipe travaille déjà à l’utiliser pour une ligne pilote aérospatiale dans le cadre du projet Penelope.
Étapes suivantes pour le projet
Ce projet de l’équipe d’Unimore a fourni une base de base pour les développements futurs dans le cadre du projet Penelope. Avec son intégration ROS2, l’équipe espère ouvrir de nouvelles voies pour la coordination des tâches et la gestion du système pour élever les capacités de l’outil.
Dans le projet Penelope, l’étape suivante consiste à appliquer le système à la fabrication d’une ligne pilote aérospatiale qui traite de l’assemblage de la partie inférieure d’un fuselage d’avion.

Utilisation de Robodk dans votre projet de recherche
Avez-vous un projet de recherche qui pourrait bénéficier de la vaste fonctionnalité de Robodk?
Ce projet de l’équipe d’Unimore n’est qu’un des nombreux projets de recherche en robotique qui utilisent Robodk. Votre projet pourrait être le prochain!
Robodk a été un outil précieux dans le projet Penelope, nous permettant de simuler efficacement des cellules robotiques personnalisées et de leur logiciel de contrôle complet à partir des phases préliminaires. Son intégration facile avec des logiciels externes a permis un développement et une mise en service plus rapides, explique Pietro Bilancia, professeur de génie mécanique chez Unimore.
L’interface simple du logiciel et l’interface API puissante vous permettent d’étendre les capacités de base du logiciel avec vos propres développements et d’éviter de réinventer la roue.
Si vous souhaitez télécharger tous les outils pour la mise en service virtuelle des cellules robotiques flexibles, Vous pouvez trouver toutes les instructions et les documents ici.
Pour essayer Robodk, il suffit de télécharger une copie d’essai gratuite Et essayez-le par vous-même. Nous avons également une licence éducative pour les chercheurs universitaires.
Quels composants industriels avez-vous souvent des défis à intégrer? Dites-nous dans les commentaires ci-dessous ou rejoignez la discussion sur Liendin, Gazouillement, Facebook, Instagramou dans Le forum Robodk.. Consultez également notre vaste collection de vidéos et abonnez-vous à la chaîne YouTube Robodk




{kind=link}