
Contrôle complet de la force dans les systèmes mécaniques sous-actualisés contraints: Conférence de Francesco Nori
- Robotique
 Noesis News
Noesis News- 0
- 7 minutes de lecture
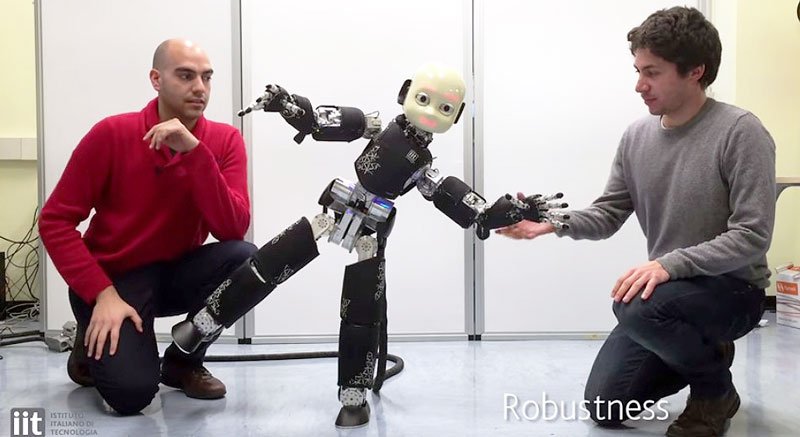
Dans cette conférence vidéo, Franceso Nori de l’Institut italien de technologie (IIT) nous guide à travers les progrès réalisés dans les robots humanoïdes ces dernières années. Par exemple, les Humanoïdes du DARPA Robotics Challenge Scilarios seront nécessaires pour ouvrir plusieurs portes pour accéder à la scène des catastrophes, mais parce qu’elles ne sont pas particulièrement rapides et ont des limitations de contrôle moteur, elles ne pourraient pas le faire aussi efficacement qu’une situation réelle nécessiterait.
Pour lutter contre ces limitations, Nori se concentre sur la recherche de moyens de faire avancer le système dynamique d’un robot – les forces qui interagissent et font bouger le système. La clé pour développer des mouvements dynamiques dans un robot est le contrôle, accompagné de la façon dont le robot interagit avec l’environnement. Nori nous parle des derniers développements, conceptions et formules pour les systèmes mécaniques à base flottante / contrainte, le contrôle de mouvement du corps entier des systèmes humanoïdes, le calcul de dynamique du corps entier sur l’ICUB humanoïde et se termine par une vidéo sur des implémentations récentes du contrôle de mouvement du corps entier sur l’ICUB.
Téléchargez la présentation complète ici.
 Francesco Nori a reçu son D.ing. diplôme (honneurs les plus élevés) de l’Université de Padova (Italie), en 2002. Il a obtenu son doctorat. Dans les systèmes de contrôle et dynamiques de la même université en 2005. En 2007, il a rejoint l’istituto italiano di Tecnologia (Italian Institute of Technology), contribuant de manière significative au développement du robot Icub humanoïde. Ses intérêts de recherche sont actuellement axés sur le contrôle des mouvements du corps entier exploitant plusieurs contacts (éventuellement conformes). Avec Giorgio Metta et Lorenzo Natale, il est l’un des principaux chercheurs impliqués dans le développement de l’ICUB, avec un accent spécifique sur le contrôle et la régulation de la force du corps entier. Francesco est actuellement impliqué dans deux projets FP7-UE: Codyco en tant que coordinateur et Koroibot en tant qu’enquêteur principal. Dans le passé, il était également enquêteur en Italk, victoriques et robotcub.
Francesco Nori a reçu son D.ing. diplôme (honneurs les plus élevés) de l’Université de Padova (Italie), en 2002. Il a obtenu son doctorat. Dans les systèmes de contrôle et dynamiques de la même université en 2005. En 2007, il a rejoint l’istituto italiano di Tecnologia (Italian Institute of Technology), contribuant de manière significative au développement du robot Icub humanoïde. Ses intérêts de recherche sont actuellement axés sur le contrôle des mouvements du corps entier exploitant plusieurs contacts (éventuellement conformes). Avec Giorgio Metta et Lorenzo Natale, il est l’un des principaux chercheurs impliqués dans le développement de l’ICUB, avec un accent spécifique sur le contrôle et la régulation de la force du corps entier. Francesco est actuellement impliqué dans deux projets FP7-UE: Codyco en tant que coordinateur et Koroibot en tant qu’enquêteur principal. Dans le passé, il était également enquêteur en Italk, victoriques et robotcub.
Série vidéo Nori F. Ijars: Contrôle complet de la force dans les systèmes mécaniques sous-actualisés mais limités (vidéo en ligne). International Journal of Advanced Robotic Systems, 2015, 12: V2. Doi: 10.5772 / 60571
Si vous avez aimé cette conférence, vous pouvez également vous intéresser:
Voir tout les dernières nouvelles de la robotique sur RoboHub, ou Inscrivez-vous à notre newsletter hebdomadaire.
Tags: c-research-innovation, cx-éducation-diy, Humanoïdes, icub, Italie, Conférence
International Journal of Advanced Robotic Systems (IJARS) est la première revue en robotique en plein accès dans le domaine des sciences, de la technologie et de la médecine.



