
Échoes de la RDC à Humanoids 2015
- Robotique
 Noesis News
Noesis News- 0
- 11 minutes de lecture
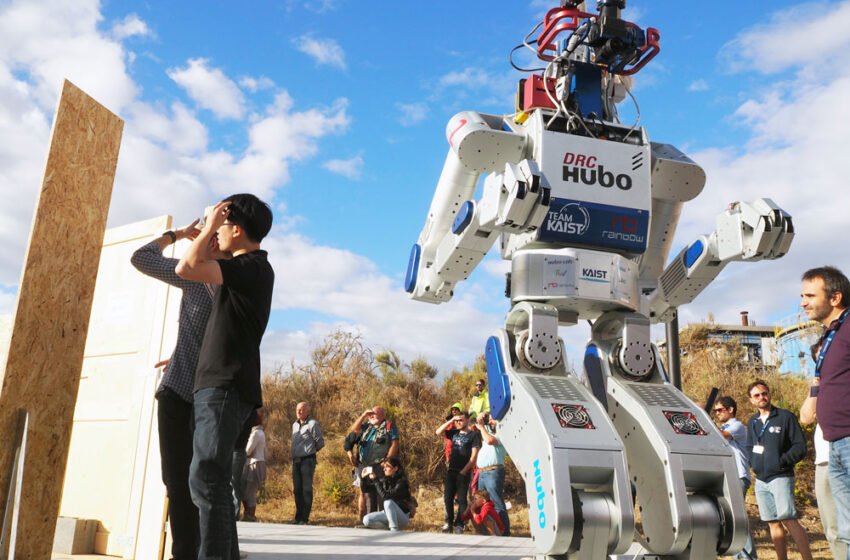
La semaine dernière, le Humanoïdes 2015 La conférence a eu lieu à Séoul, en Corée. C’est le premier événement à se concentrer sur les robots humanoïdes depuis le DARPA Robotics Challenge (RDC) Plus tôt cette année et, en fait, l’emplacement abrite les gagnants de la RDC, Équipe kaist. Par conséquent, il n’est pas surprenant que l’événement ait été très orienté vers la RDC et ait même présenté un mini-Darpa Challenge.
Les humanoïdes sont une petite conférence par rapport à l’IROS ou à l’ICRA. Et j’apprécie vraiment cela parce que cela vous donne la possibilité d’interagir plus étroitement avec les gens qui travaillent réellement dans le domaine humanoïde; Moins de personnes, moins de séances simultanées et plus d’interaction.
La conférence a duré trois jours, avec le premier dédié aux ateliers et aux autres à la conférence principale elle-même.
J’ai assisté au Benchmarking Fonctions bipèdes des robots humanoïdes: vers un cadre unifié atelier et a donné une conférence Comment utiliser des simulations de nuage pour l’analyse comparative d’une manière générale et impartiale. Des articles très intéressants ont été présentés à cet atelier, en particulier sur la façon de construire un cadre général pour comparer la marche dans les humanoïdes (par des partenaires du projet Koroibot)
La conférence principale a été divisée en pourparlers en plénière, présentations en papier et séances interactives. Il y a eu des visites guidées aux laboratoires de Kist (l’Institut coréen pour les sciences et la technologie) et une démo complète du Hubo Robot faisant tous les tests de la RDC.

J’ai adoré les deux pourparlers plénières, en particulier le premier donné par Aude Billard de epfl. Elle a présenté un beau chemin de recherche vers la création de robots qui peuvent faire mieux que les humains (compétences super humaines). Elle a montré ses résultats avec l’étude d’un robot capable de saisir une raquette lorsqu’elle a été lancée, en utilisant des systèmes dynamiques. C’était impressionnant de voir comment son robot a pu saisir les raquettes et même les balles, où un humain n’est pas en mesure de le faire.
Le deuxième discours plénière a été donné par Russ Tedrakeun participant de la RDC. Il a décrit plusieurs problèmes auxquels les équipes ont été confrontées lorsqu’ils ont essayé de contrôler un robot pendant le défi. Il a démontré sa quête en essayant d’exploiter la structure des équations gouvernantes du contrôle basé sur le modèle, afin de créer un contrôle plus robuste pour la dynamique des robots. J’ai vraiment apprécié son discours, même si je ne le comprenais pas beaucoup.
Les présentations en papier étaient limitées à dix minutes par publication et je vous recommande de vérifier toute la liste des articles présentés ici.
Les visites techniques étaient des visites dans certains laboratoires KIST comme le Centre de robotique intelligenteet le Groupe de recherche en robotique des soins de santé. Le premier laboratoire est dédié à l’utilisation de robots sociaux pour améliorer les capacités cognitives des personnes âgées. Il se concentre sur les petits humanoïdes qui engagent les personnes âgées pour jouer à des jeux qui stressent leurs compétences cognitives. Le deuxième laboratoire s’intéresse davantage aux robots pour la chirurgie.

Maintenant, l’activité la plus impressionnante était la Demo RDC. C’était incroyable de voir comment l’équipe kaist a effectué une démo complète du début à la fin sans aucun problème. Le robot a pu monter dans la voiture, conduire, sortir, ouvrir une porte, fermer la vanne, effectuer un foret, marcher et enfin monter les escaliers. Et ils l’ont fait sur trois jours consécutifs. Sur la base de mon expérience dans plusieurs compétitions Robocup, je sais à quel point il est difficile de faire tout ce travail pour une démo, donc je ne peux rien dire que: Bravo Kaist!
Évaluer la conférence, de mon point de vue, je pense qu’il est très (trop) axé sur le contrôle des humanoïdes. La grande majorité des articles sont dédiés à des problèmes de contrôle spécifiques auxquels les humanoïdes sont confrontés et qui les rendent tellement plus complexes que les robots à roues. Personnellement, j’ai remarqué le manque d’articles plus préoccupé par les problèmes cognitifs, où le fait que le robot soit un humanoïde pourrait être utilisé pour créer des comportements plus complexes.
Il aurait également pu y avoir un panel d’experts en quelque sorte pour analyser les résultats du DARPA Robotics Challenge et comment un deuxième tour du concours améliorerait (ou non) la technologie humanoïde.
Peut-être l’année prochaine!

Tags: c-événements, CX-Santé-Medicine, CX-Research-innovation, Darpa, RDC, Humanoïdes

Ricardo Téllez est co-fondateur et CTO de la construction



