
Comment les données OpenUSD et synthétiques façonnent l’avenir du robot humanoïde
- Robotique
 Noesis News
Noesis News- 0
- 12 minutes de lecture
Note de l’éditeur: ce post fait partie de Dans l’omniverseune série axée sur la façon dont les développeurs, les praticiens 3D et les entreprises peuvent transformer leurs flux de travail en utilisant les dernières avancées en Openusd et Nvidia Omverse.
Les robots humanoïdes deviennent rapidement une réalité. Ceux construits sur Nvidia Isaac GR00T apprennent déjà à marcher, à manipuler des objets et à interagir autrement avec le monde réel.
La collecte d’ensembles de données divers et importants pour former ces machines sophistiquées peut prendre du temps et coûteux. En utilisant Données synthétiques (ODD)générés à partir de jumeaux numériques physiquement précis, chercheurs et développeurs peuvent former et valider leurs modèles d’IA en simulation avant le déploiement dans le monde réel.
Description de la scène universellealias OpenUSD, est un cadre puissant qui facilite la création de ces environnements virtuels physiquement précis. Une fois les environnements 3D construits, OpenUSD permet aux équipes de développer des simulations détaillées et évolutives ainsi que des scénarios réalisants où les robots peuvent pratiquer, apprendre et améliorer leurs compétences.
Ces données synthétiques sont essentielles pour robots humanoïdes Apprendre des comportements humains tels que la marche, la saisie des objets et la navigation sur des environnements complexes. OpenUSD améliore le développement de robots humanoïdes et ouvre la voie à un avenir où ces machines peuvent s’intégrer de manière transparente dans la vie quotidienne des gens.
Le Nvidia Omverse La plate-forme, alimentée par OpenUSD, offre aux développeurs un moyen d’unifier les actifs 3D à partir de sources disparates telles que les outils 3DCAD et la création de contenu numérique (DCC). Cela leur permet de créer des environnements virtuels 3D à grande échelle et d’exécuter des simulations complexes pour former leurs robots, rationaliser l’ensemble du processus et offrir des moyens plus rapides et plus rentables de collaborer et de développer AI physique.
Formation de robot avancé avec des données de mouvement synthétique
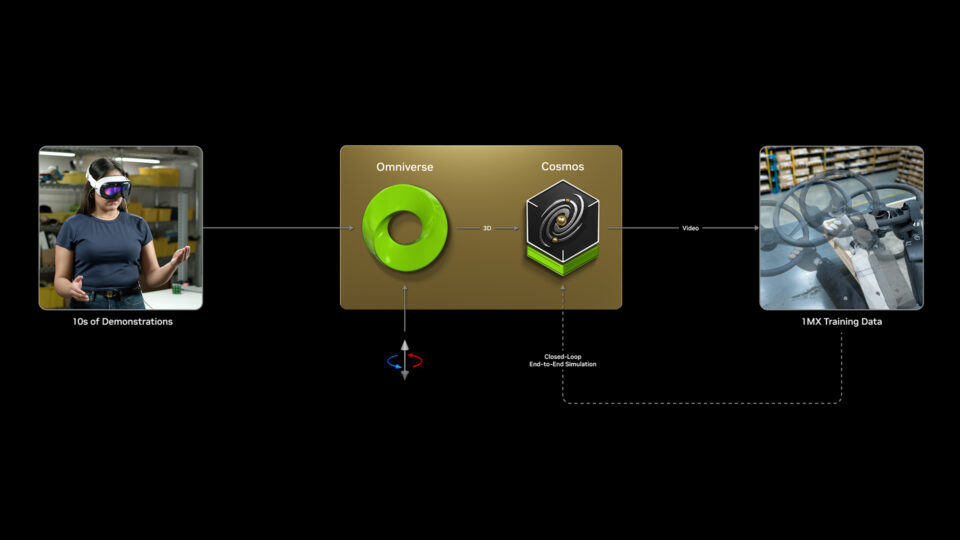
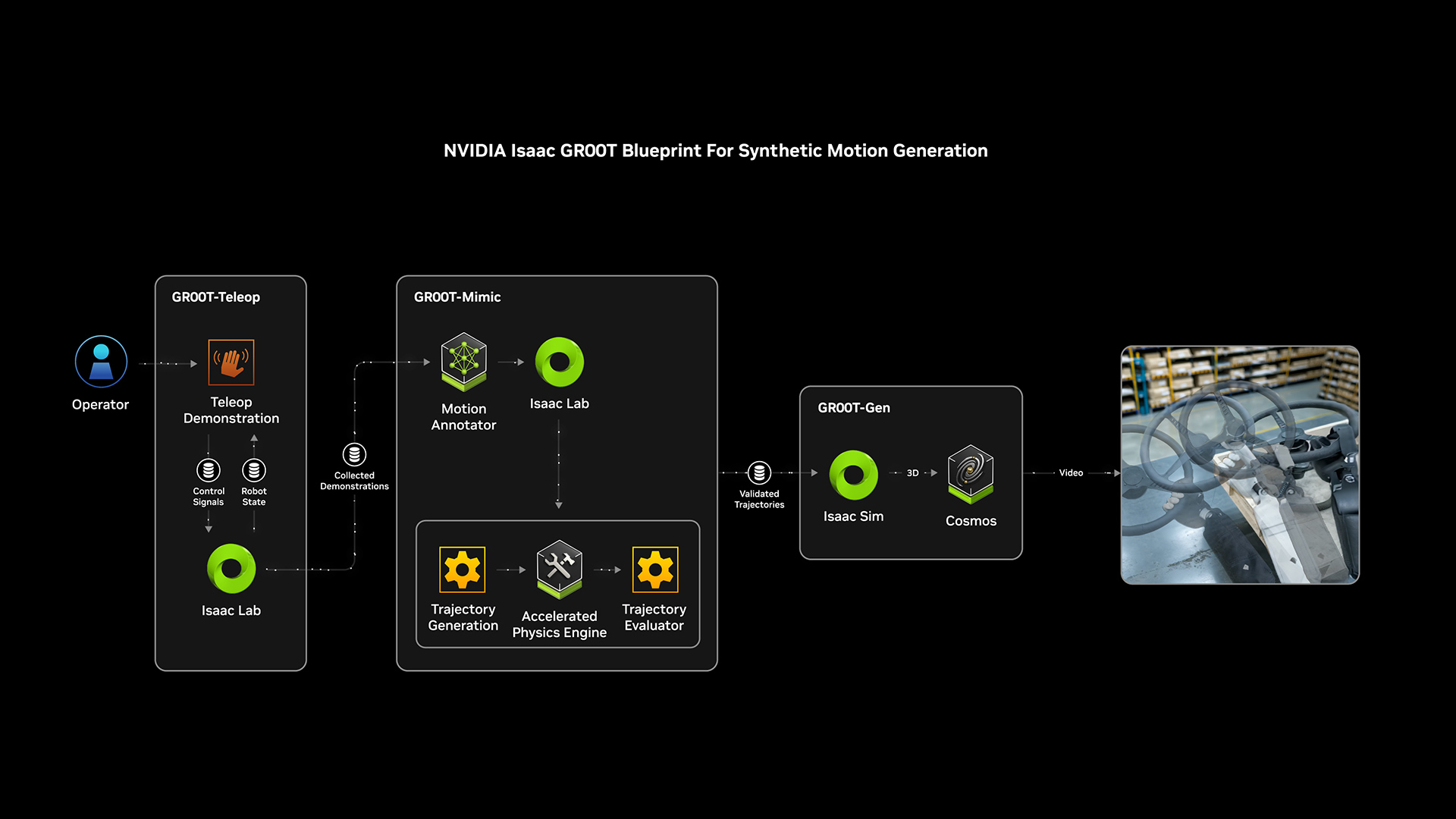
Au CES le mois dernier, Nvidia a annoncé le Blueprint Isaac GR00T Pour une génération de mouvement synthétique, pour aider les développeurs à générer des ensembles de données de mouvement synthétiques de façon exponentielle plus grands pour former des humanoïdes en utilisant l’apprentissage de l’imitation.
Les faits saillants de la version incluent:
- Génération de données de mouvement à grande échelle: Utilise la simulation ainsi que des techniques d’IA génératives pour générer des ensembles de données exponentiellement grands et divers de mouvements humains, accélérant le processus de collecte de données.
- Augmentation des données plus rapide: Nvidia cosmos Les modèles World Foundation génèrent des vidéos photoréalistes à grande échelle en utilisant la simulation au sol de la vérification d’OmIverse. Cela permet aux développeurs d’augmenter les ensembles de données synthétiques plus rapidement, pour entraîner des modèles d’IA physiques, réduisant l’écart de simulation à réel.
- Formation de simulation d’abord: Au lieu de s’appuyer uniquement sur les tests du monde réel, les développeurs peuvent former des robots dans des environnements virtuels, ce qui rend le processus plus rapide et plus rentable.
- Brider virtuel à la réalité: La combinaison de données réelles et synthétiques ainsi que la formation et les tests basés sur la simulation permettent aux développeurs de transférer les compétences des robots acquises dans le monde virtuel au monde réel.
Simulation de l’avenir de la robotique
Robots humanoïdes Améliorent l’efficacité, la sécurité et l’adaptabilité dans les secteurs comme la fabrication, l’entrepôt et la logistique et les soins de santé en automatisant des tâches complexes et en augmentant les conditions de sécurité pour les travailleurs humains.
https://www.youtube.com/watch?v=WAZ08Z3UIMK
Les grandes sociétés de robotique Dynamique de Boston et Chiffre ont déjà commencé à adopter et à démontrer des résultats avec Isaac GR00T.
Fondations à l’échelle réduit la barrière au développement de la robotique dans tous les facteurs de forme, des bras robotiques aux humanoïdes. La société Plate-forme de grille ouvertequi a Nvidia Isaac Sim Les intégrations offrent aux développeurs un moyen simplifié de simuler des robots via un environnement de développement basé sur un navigateur facile à utiliser.
Branchez-vous dans le monde d’OpenUSD
En savoir plus sur OpenusdRobots humanoïdes et les dernières avancées d’IA à Nvidia GTCune conférence mondiale de l’IA, du 17 au 21 mars à San Jose, en Californie.
Ne manquez pas le fondateur et PDG de Nvidia Le Keynote GTC de Jensen Huang le mardi 18 mars – en personne au SAP Center ou en ligne. Il partagera les dernières technologies stimulant la prochaine vague dans l’IA, les jumeaux numériques, les technologies cloud et l’informatique durable.
La GTC inaugurale Journée du développeur humanoïde aura lieu le mercredi 18 mars. Après les sessions, rejoignez le Meetup de développeur d’IA physique Pour réseauter avec les développeurs et les chercheurs de NVIDIA GTC. Discutez des dernières percées dans OpenUSD et une simulation générative alimentée par l’IA et des jumeaux numériques, ainsi que des innovations dans la robotique généraliste pour la prochaine frontière des industries.
Apprendre Comment utiliser USD Et continuez d’optimiser les flux de travail 3D avec le nouveau rythme auto-rythmé »Apprenez OpenUSD”Curriculum pour les développeurs et praticiens 3D, disponibles gratuitement à travers le NVIDIA Deep Learning Institute. Pour plus de ressources sur OpenUSD, explorez le Alliance pour le forum OpenUSD et le Site Web AUSD.
Rester à jour en abonnement à Nvidia Newsrejoignant le communauté et après Nvidia Omverse sur Instagram, Liendin, Moyen et X.
Image en vedette gracieuseté de Fourier.



