
Dévoiler l’arbre des robots: une nouvelle taxonomie pour comprendre la diversité robotique
- Intelligence Artificielle
 Noesis News
Noesis News- 0
- 10 minutes de lecture

Au Tum Mirmi, AI Robot Safety & Performance Center, les chercheurs Kübra Karacan, Robin Kirschner et Alessandro Melone (ROM de gauche à droite) ont analysé la sensibilité des manipulateurs robotiques. | Crédit: tum
Des chercheurs de l’Institut Munich de la robotique et de l’intelligence machine, ou Mirmi, à l’Université technique de Munich, ont créé un «arbre de robots», un nouveau schéma d’évaluation pour mesurer la sensibilité des robots autonomes. La sensibilité est cruciale pour l’interaction sûre et flexible par l’homme-robot, et il n’y a pas eu de moyen standard de l’évaluer, ont-ils déclaré.
Université technique de Munich (Tumeau) Les chercheurs ont déclaré que un nouveau programme permettra la comparaison des robots industriels et, finalement, d’autres systèmes robotiques, tels que plates-formes mobiles, humanoïdeset mains robotiques.
«Une telle norme pourrait ouvrir la voie à un sceau de qualité pour le marché de la robotique en pleine expansion», a affirmé le professeur. Achim lienthalDirecteur adjoint de Mirmi et professeur de perception des systèmes intelligents à Tum. «Connaître les capacités de performance d’un système de robot est une énorme aide à l’industrie, où les entreprises veulent faire le meilleur usage possible des systèmes robotiques.»
« La méthodologie de test de tummi a le potentiel de devenir une norme de test industrielle », a-t-il déclaré. «Connaître les capacités de performance d’un système de robot est une énorme aide à l’industrie, où les entreprises veulent faire le meilleur usage possible des systèmes robotiques.»
La catégorisation mène à l’arbre des robots
Les chercheurs ont commencé par examiner et catégoriser des robots à bras uniques de divers fabricants qui sont utilisés dans l’industrie et la recherche.
Bien qu’ils apparaissent souvent similaires, ces bras robotiques possèdent des caractéristiques distinctes dans leur capteurs, moteurset interne contrôle Systèmes. Cela conduit à des différences substantielles dans leurs capacités fondamentales: certains excellent dans le pouvoir et la précision, tandis que d’autres sont conçus pour une interaction flexible et sensible avec leur environnement et leurs pièces.
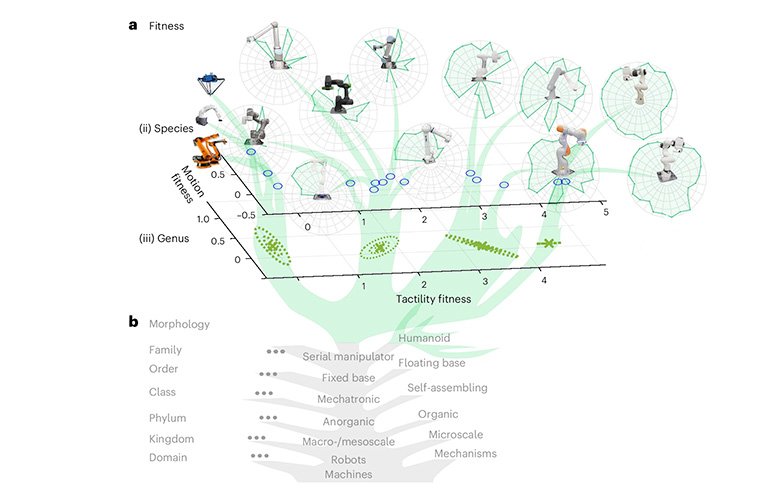
Pour illustrer ces variations et les progrès en cours de la robotique, les chercheurs de Tum Mirmi AI Robot Safety & Performance Center a créé l’arbre des robots. Inspiré par l’arbre de vie de Charles Darwin, cette visualisation illustre les diverses adaptations de diverses espèces de robots à leurs habitats respectifs.
Les chercheurs ont identifié 25 mesures spécifiques pour décrire la sensibilité d’un robot pendant le contact physique. Ces mesures aident à déterminer si la force appliquée à une surface s’aligne sur la force prévue, par exemple, ou si un robot pouvait blesser un humain.
Un diagramme d’araignée généré à partir de ces 25 mesures permet une évaluation visuelle rapide de la sensibilité d’un robot, même pour celles sans connaissances spécialisées.
En fonction de leurs performances, les systèmes robotiques sont classés comme robots industriels, couvrer, robots mouset « tactile robots. » Chirurgical Les robots, par exemple, sont principalement évalués sur leur précision. Pour entrepôt ou usine Applications, l’accent est mis sur la force et la résilience – leur capacité à effectuer des mouvements répétitifs sur des périodes prolongées.
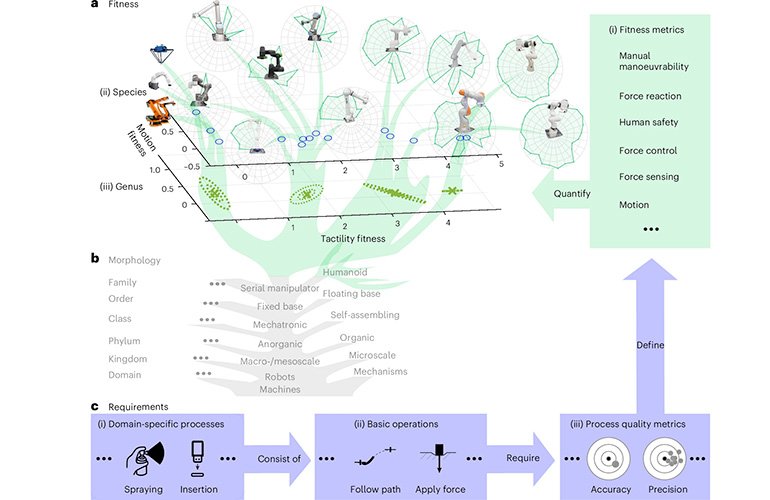
«Nous combinons des mesures de mouvement existantes avec nos nouvelles mesures tactiles pour fournir le tout premier aperçu de la totalité des capacités de base pour les interactions physiques d’un système robotique», a noté le directeur de laboratoire Robin Kirschner.
Une taxonomie composée des composants basés sur l’architecture du système (gris), les performances de l’incarnation (vert) et le processus (bleu). A, la classification basée sur les robots-fitness: (i) les mesures de fitness qui définissent les parcelles d’araignée verte, à savoir le spectre de fitness du robot; (ii) l’espèce d’un mode de réalisation défini par le score de fitness global tracé sur le mouvement et la forme physique de la tactilité; (iii) Les groupes de genre regroupant les espèces de robots en catégories de fitness basées sur les processus. B, représentation de morphologie hiérarchique. C, les exigences d’automatisation des processus qui sont transférées dans les mesures de fitness du robot requises par (i) l’identification des processus spécifiques au domaine; (ii) déduction des opérations de base requises; (iii) Des mesures de qualité décrivant le processus qui définit les mesures de fitness de mode de mode de mode requises. | Crédit: tum
TUM pourrait être un centre de test allemand pour les robots
L’équipe publié un document de recherche Intitulé «Catégoriser les robots de la forme physique de la performance dans l’arbre des robots» dans la nature en février 2025.
Prof. Lorenzo Masiadirecteur exécutif de Tumeau Mirmi, a ajouté: «Sur la base de l’idée originale, je suis certain que le centre de sécurité et de performance AI Robot à TUM Mirmi deviendra un Centre national de tests national indépendant pour la robotique. »
Un conseil d’administration de cinq membres supervise la stratégie de recherche et d’innovation de Tum Mirmi, le contenu d’enseignement de base et la création de nouveaux groupes de discussion. Le tableau comprend:
- Prof. Masia, directeur exécutif
- Le professeur Lilienthal, directeur adjoint et directeur de la stratégie et des partenariats
- Prof. Angela Schoellig, directrice de l’industrie et des affaires internationales
- Le professeur Eckehard Steinbach, directeur des startups et des infrastructures
Source link



