
Le système Microrobot est conçu pour flotter à l’intérieur du patient AVC pour la thrombectomie autonome
- Intelligence Artificielle
 Noesis News
Noesis News- 0
- 14 minutes de lecture




Artedrone a conçu son système de thrombectomie mécanique Sasha pour utiliser les aimants et la robotique pour aider le cathéter à récupérer le caillot sanguin d’un patient AVC. | Source: artedrone
L’élargissement des soins aux victimes d’AVC est l’une des plus grandes opportunités de MedTech, et le démarrage d’Atedrone développe un système de microrobot qui peut naviguer vers des caillots sanguins pour des thrombectomies mécaniques autonomes.
Soutenu par la capitale de la truffe, Artedrone a Constructions soumises De son programme préclinique de publication dans une revue de recherche sans nom alors qu’il continue de tester pour verrouiller la conception du système Sasha pour sa première procédure humaine en 2027.
Basé à Paris démarrer essaie d’augmenter un tour de financement de 20 millions d’euros (22,5 millions de dollars américains) pour finaliser le travail préclinique et financer les premières études humaines, avec une série C suivant pour financer une étude pivot d’ici 2028.
«Une idée derrière l’entreprise est de démocratiser ces procédures très complexes», a déclaré à Zimmer Biomet, PDG d’Atedrone Design médical et externalisation.
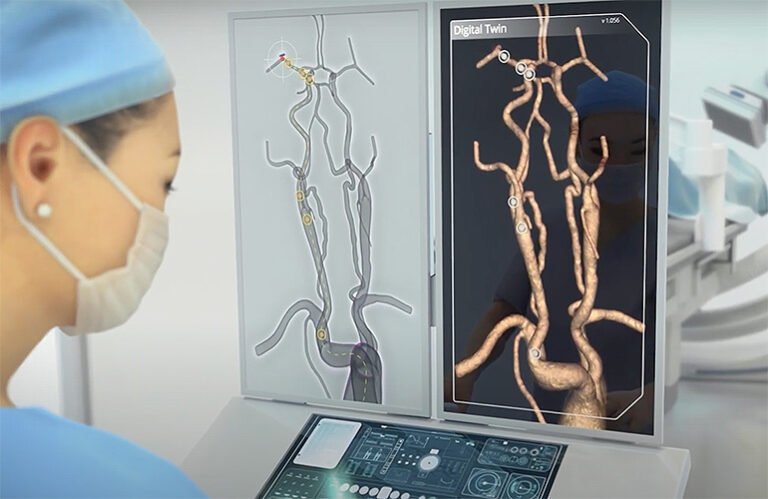
Avant la procédure, les tomodensitogrammes ou l’IRM construiraient un jumeau numérique du système vasculaire du patient pour cartographier un chemin vers le caillot sanguin. | Source: artedrone
Le système Sasha crée un jumeau numérique médical
Le système Sasha est conçu pour utiliser l’imagerie IRM ou CT – les mêmes analyses qui peuvent localiser et confirmer un caillot sanguin dans une victime d’AVC – pour créer un jumeau numérique du système vasculaire du cerveau pour tracer un chemin pour que le cathéter atteigne et retire le caillot.
Dans un laboratoire de cathétérisme ou un laboratoire de neuroradiologie interventionnel, un interventionniste insérait le cathéter dans l’aine du patient et jusqu’à leur artère carotide.
« C’est le camp de base », a déclaré Teplitsky. « Après cela, vous appuyez sur un bouton et le robot est libéré. Il est propulsé par le flux sanguin – il n’est pas actif de cette façon – jusqu’à ce qu’il y ait une bifurcation, comme une fourche sur la route. »
« Nous avons déjà pré-planifié, nous savons exactement où nous voulons aller, et c’est là que notre aimant externe entre en jeu », a-t-elle ajouté. « Il pousse ou tire l’aimant (sur le cathéter) dans la bonne direction, puis il continue le long de cette voie alors que nous laissons échapper un peu plus de ligne automatiquement au point suivant. S’il y a une autre bifurcation, nous utilisons à nouveau l’aimant. »
Les aimants du bras robotique et du cathéter du système Sasha aident le dispositif de thrombectomie sur le chemin du caillot sanguin. | Source: artedrone
Artedrone utilise des aimants pour aborder les caillots
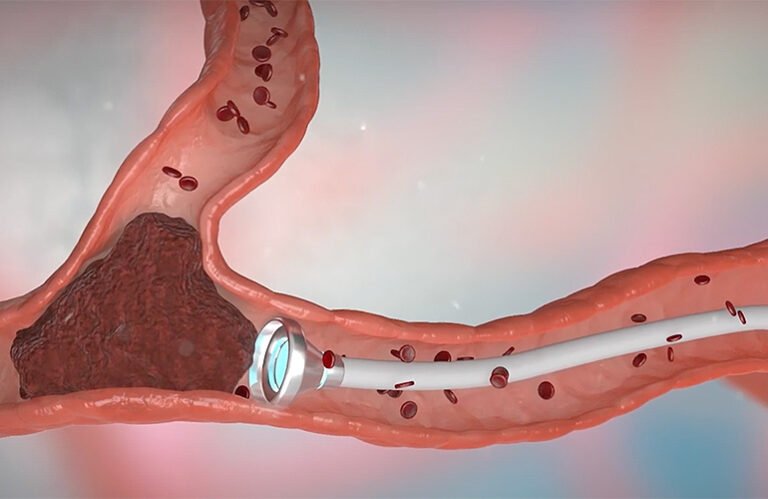
Le sang ralentit alors que le cathéter s’approche du caillot qui bloque le navire, à quel point l’aimant positionne l’extrémité distale du cathéter pour saisir le caillot.
« Il agit comme une aspiration comme un cathéter d’aspiration, mais vous voyez des propriétés très différentes de celle d’un cathéter d’aspiration normal », a déclaré Teplitsky, qui l’a décrit comme une tasse d’aspiration magnétique. « Vous allumez l’aspiration et nous avons une boucle de rétroaction qui nous dit si nous sommes vraiment adhérés (au caillot avant), nous commençons à reculer. »
La ligne est conçue pour être suffisamment flexible pour naviguer vers le caillot, mais suffisamment forte pour l’attraper et le retirer, se retirant dans le cathéter de guidage et hors du patient par l’opérateur à la table.
« Vous appuyez essentiellement sur un bouton et il le retire dans le système vasculaire », a-t-elle déclaré. « (Comme) un cathéter d’aspiration, il y a toujours le risque de rupture du caillot lorsque vous reculez, mais l’essentiel est que nous avons le cathéter de base de base aussi près que nous pensons que nous pouvons y arriver pour pouvoir le retirer. … Nous avons de très bons résultats montrant que c’est très efficace. »
Teplitsky a refusé de divulguer le matériel du système pour des raisons compétitives. Dans un communiqué, Artedrone a déclaré que la sous-coupe magnétique du microrobot «présente en même temps les propriétés magnétiques appropriées pour l’actionnement magnétique et la conception appropriée pour optimiser l’interaction avec le caillot.»
« La Coupe est liée à une section innovante avec les propriétés antagonistes telles qu’une forte flexibilité et une faible tension », a déclaré la société. «Cette section est connectée à une structure multicouche avec les propriétés appropriées pour pousser.»
Le cathéter de thrombectomie mécanique dans le système Sasha se déplace avec le flux de sang vers un caillot pour la capture et la récupération en utilisant l’aspiration. | Source: artedrone
Défis à venir pour artedrone
« Nous voulons accéder aux centres d’AVC de niveau II, peut-être même les centres de soins cardiaques où vous avez des mains expertes pour entrer dans le carotide, puis après cela, ils n’ont pas à accéder à ce système vasculaire cérébral, qui prend deux à sept ans de formation supplémentaires dépend de qui vous parlez et de votre pays », a déclaré Teplitsky.
«L’un des plus grands défis et opportunités est que nous savons que le neuroradiologue interventionnel devra certainement être impliqué, mais notre jeu à long terme sera dans ces centres d’AVC de niveau II, potentiellement avec le cardiologue interventionnel comme l’une des pistes», a-t-elle poursuivi. « Alors, comment pouvons-nous trouver la meilleure voie à suivre pour notre premier homain – quels centres nous voulons aller, avec qui voulons-nous nous associer, et à quoi cela ressemble – et vraiment cartographier cela avec le risque-avantage pour les patients? »
Verrouiller la conception du système, la finalisation du développement et la documentation de la construction pour une revue réglementaire est « un chemin relativement simple à ce stade », a déclaré Teplitsky, avec la dégagement de la FDA 510 (k) la route la plus probable.
Jusqu’à présent, leur équipement de test comprenait des modèles 3D d’anatomie porc et humain avec un système vasculaire précis, des pressions sanguines, une viscosité et une température.
«Je continue de parler avec mon équipe de la création d’une IP autour de ce banc de test, car cela a été à peu près autant de travail que le produit à ce stade», a-t-elle déclaré. «Nous avons appris de grandes leçons de cela. Maintenant, nous avons un modèle in vitro vraiment robuste qui se traduit par le modèle in vivo, afin que vous puissiez vous sentir très confiant lorsque vous passez de l’un à l’autre.»
Mais il y a deux grands défis restants qui sont communs aux développeurs MedTech travaillant avec robotique.

Le PDG d’Atedrone Liane Teplitsky. | Source: artedrone
« L’une est de s’assurer que cela répond vraiment à un besoin, et je pense que nous l’avons fait », a-t-elle déclaré. «Nous savons ce que nous essayons de faire. Il y a un énorme besoin.
La technologie pourrait finir par être utile pour d’autres procédures neurovasculaires ou dans des applications endovasculaires ou cardiovasculaires.
« Il y a certainement une opportunité en regardant tout le système, non seulement la composante du cathéter, mais ce que nous faisons autour de l’imagerie, de l’IA, de la livraison du cathéter », a-t-elle déclaré. «Tous ces différents composants pourraient certainement être appliqués à différents endroits.»
Note de l’éditeur: Cet article a été syndiqué à partir de Le rapport robot site de frère Design médical et externalisation.
Source link



