Le capteur en forme de doigt permet des robots plus dextères
- Robotique
 Noesis News
Noesis News- 0
- 11 minutes de lecture

Les chercheurs du MIT ont développé un capteur tactile basé sur la caméra qui est long, incurvé et en forme de doigt humain. Leur appareil, qui fournit une détection tactile haute résolution sur une grande surface, pourrait permettre à une main robotique d’effectuer plusieurs types de lanks. Image: gracieuseté des chercheurs
Par Adam Zewe | NOUVELLES MIT
Imaginez saisir un objet lourd, comme une clé à pipe, d’une main. Vous prenez probablement la clé à l’aide de vos doigts entiers, pas seulement de vos doigts. Les récepteurs sensoriels de votre peau, qui se déroulent sur toute la longueur de chaque doigt, enverraient des informations à votre cerveau sur l’outil que vous saisissez.
Dans une main robotique, les capteurs tactiles qui utilisent des caméras pour obtenir des informations sur les objets saisis sont petits et plats, ils sont donc souvent situés dans les doigts. Ces robots, à leur tour, n’utilisent que leurs doigts pour saisir des objets, généralement avec un mouvement de pincement. Cela limite les tâches de manipulation qu’ils peuvent effectuer.
Les chercheurs du MIT ont développé un capteur tactile basé sur la caméra qui est long, incurvé et en forme de doigt humain. Leur appareil offre une détection tactile haute résolution sur une grande zone. Le capteur, appelé Gelsight Svelte, utilise deux miroirs pour réfléchir et réfracter la lumière afin qu’un appareil photo, situé à la base du capteur, puisse voir sur toute la longueur du doigt.
De plus, les chercheurs ont construit le capteur en forme de doigt avec une squelette flexible. En mesurant comment le squelette se plie lorsque le doigt touche un objet, ils peuvent estimer la force placée sur le capteur.
Ils ont utilisé des capteurs Gelsight Svelte pour produire un main robotique Cela a pu saisir un objet lourd comme le ferait un humain, en utilisant toute la zone de détection de ses trois doigts. La main pourrait également effectuer les mêmes pincements communs aux pinces robotiques traditionnelles.

Ce GIF montre une main robotique qui incorpore trois capteurs Gelsight Svelsig en forme de doigt. Les capteurs, qui fournissent une détection tactile haute résolution sur une grande surface, permettent à la main d’effectuer plusieurs lanks, y compris des saignements qui utilisent uniquement les doigts et une prise de puissance qui utilise toute la zone de détection des trois doigts. Crédit: gracieuseté des chercheurs
«Parce que notre nouveau capteur est en forme de doigt humain, nous pouvons l’utiliser pour faire différents types de saisons pour différentes tâches, au lieu d’utiliser des landes de pincement pour tout. papier sur Gelsight svelte.
Zhao a écrit le journal avec l’auteur principal Edward Adelson, le professeur John et Dorothy Wilson de science de la vision au Département des sciences du cerveau et des sciences cognitives et membre du laboratoire d’intelligence informatique et d’intelligence artificielle (CSAIL). La recherche sera présentée à la conférence IEEE sur les robots et systèmes intelligents.
Miroir miroir
Les caméras utilisées dans les capteurs tactiles sont limitées par leur taille, la distance focale de leurs objectifs et leurs angles de vision. Par conséquent, ces capteurs tactiles ont tendance à être petits et plats, ce qui les limite aux doigts d’un robot.
Avec une zone de détection plus longue, qui ressemble plus à un doigt humain, la caméra devrait s’asseoir plus loin de la surface de détection pour voir toute la zone. Cela est particulièrement difficile en raison des restrictions de taille et de forme d’une pince robotique.
Zhao et Adelson ont résolu ce problème en utilisant deux miroirs qui réfléchissent et réfractent la lumière vers un seul appareil photo situé à la base du doigt.
Gelsight Svelte incorpore un miroir plat et incliné qui se trouve en face de la caméra et un long miroir incurvé qui se trouve le long de l’arrière du capteur. Ces miroirs redistribuent les rayons lumineux de la caméra de telle manière que la caméra peut voir la longueur du doigt entier.
Pour optimiser la forme, l’angle et la courbure des miroirs, les chercheurs ont conçu un logiciel pour simuler la réflexion et la réfraction de la lumière.
«Avec ce logiciel, nous pouvons facilement jouer avec l’endroit où se trouvent les miroirs et comment ils sont incurvés pour avoir une idée de la façon dont l’image s’occupera de nous réellement réellement le capteur», explique Zhao.
Les miroirs, la caméra et deux ensembles de LED pour l’éclairage sont attachés à un squelette en plastique et enfermés dans une peau flexible à base de gel de silicone. La caméra considère l’arrière de la peau de l’intérieur; Sur la base de la déformation, il peut voir où le contact se produit et mesurer la géométrie de la surface de contact de l’objet.
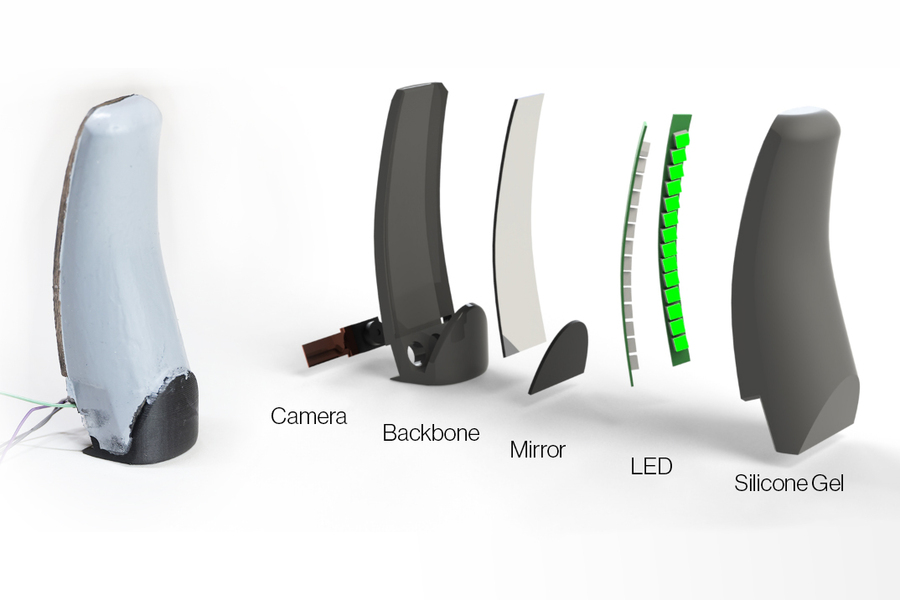
Une ventilation des composants qui composent le capteur tactile en forme de doigt. Image: gracieuseté des chercheurs
De plus, les tableaux LED rouges et verts donnent une idée de la profondeur du gel lorsqu’un objet est saisi, en raison de la saturation de la couleur à différents endroits sur le capteur.
Les chercheurs peuvent utiliser ces informations sur la saturation des couleurs pour reconstruire une image de profondeur 3D de l’objet saisissant.
L’épranche en plastique du capteur lui permet de déterminer les informations proprioceptives, telles que les couples de torsion appliqués au doigt. L’épine dorsale se penche et se flexion lorsqu’un objet est saisi. Les chercheurs utilisent l’apprentissage automatique pour estimer la quantité de force appliquée au capteur, en fonction de ces déformations de l’épine dorsale.
Cependant, la combinaison de ces éléments dans un capteur de travail n’était pas une tâche facile, dit Zhao.
« S’assurer que vous avez la bonne courbure pour que le miroir corresponde à ce que nous avons dans la simulation est assez difficile. De plus, j’ai réalisé qu’il y avait des types de superglue qui inhibent le durcissement du silicium. Il a fallu beaucoup d’expériences pour faire un capteur qui fonctionne réellement », ajoute-t-il.
Prise polyvalente
Une fois qu’ils ont perfectionné la conception, les chercheurs ont testé le Gelsight Svelte en appuyant sur des objets, comme une vis, à différents endroits sur le capteur pour vérifier la clarté de l’image et voir à quel point il pourrait bien déterminer la forme de l’objet.
Ils ont également utilisé trois capteurs pour construire une main Gelsight Svelte qui peut effectuer plusieurs lanks, y compris une prise de pincement, une prise de pincement latérale et une saisie de puissance qui utilise toute la zone de détection des trois doigts. La plupart des mains robotiques, qui sont en forme de nappes à mâchoires parallèles, ne peuvent effectuer que des landes de pincement.
Une saisie de puissance à trois doigts permet à une main robotique de maintenir un objet plus lourd plus stable. Cependant, les gras de pincement sont toujours utiles lorsqu’un objet est très petit. Être capable d’effectuer les deux types de landes d’une seule main donnerait un robot plus polyvalent, dit-il.
À l’avenir, les chercheurs prévoient d’améliorer le Gelsight Svelte afin que le capteur soit articulé et puisse se plier aux articulations, plus comme un doigt humain.
«Les capteurs de doigts optiques-tactiles permettent aux robots d’utiliser des caméras bon marché pour collecter des images à haute résolution de contact de surface, et en observant la déformation d’une surface flexible, le robot estime la forme de contact et les forces appliquées. Ce travail représente un progrès sur la conception des doigts Gelsigh Professeur adjoint de génie mécanique à l’Université de Stanford, qui n’était pas impliqué dans cette recherche. «Améliorer le sentiment de contact d’un robot pour aborder la capacité humaine est une nécessité et peut-être le problème du catalyseur pour développer des robots capables de travailler sur des tâches complexes et mâles.»
Cette recherche est soutenue, en partie, par le Toyota Research Institute.

NOUVELLES MIT