
Construisez un robot compagnon en peluche câlin avec de jolies oreilles LED
- Robotique
 Noesis News
Noesis News- 0
- 12 minutes de lecture

Seule la moitié féminine du câble d’extension servo est nécessaire. Coupez le connecteur féminin du câble avec environ 2 « de ses fils. Souder ses fils de puissance et de signal aux épingles de chauve-souris et de D13 de la plume, et laisse le fil de terre non connu pour le moment.
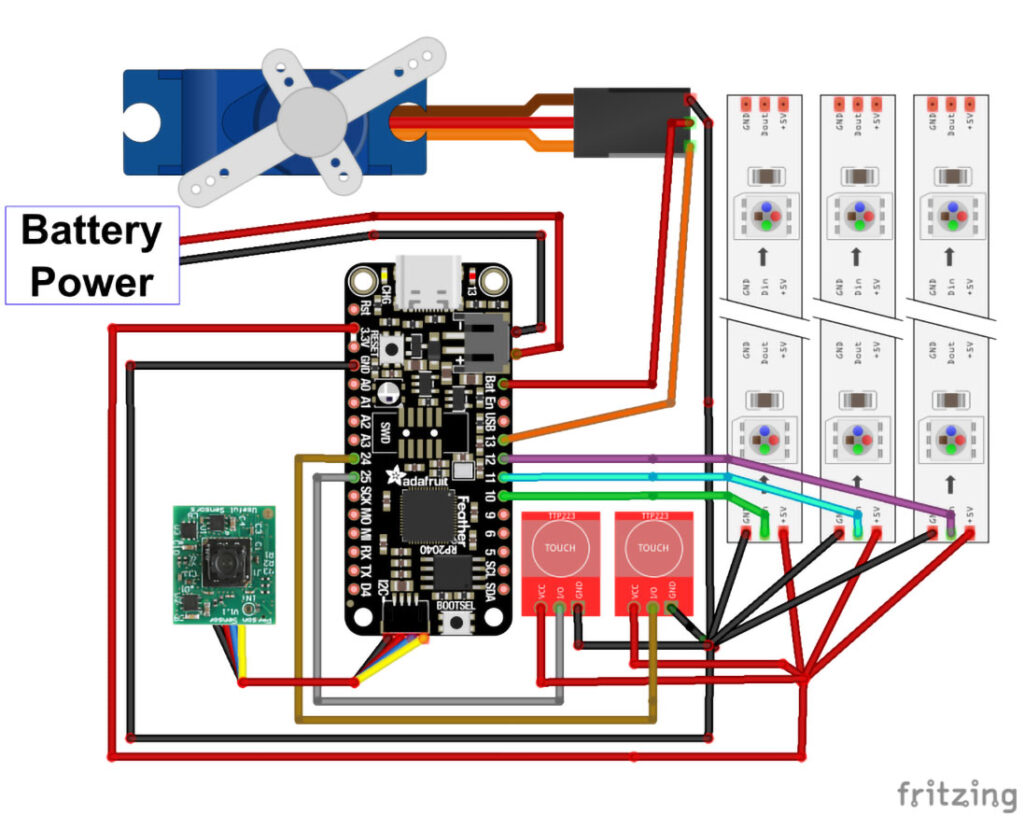
Les connexions câblées entre le RP2040 de la plume et ses périphériques sont illustrées à la figure S. Les broches 3V et GND de la plume fournissent une puissance pour trois chaînes LED et deux capteurs tactiles.
Pour simplifier les connexions, nous souderons ensemble les fils d’alimentation des périphériques en deux grappes pour l’alimentation et la terre, puis connecter chaque groupe à un seul segment de fil de noyau solide qui se connecte ensuite à une seule broche en plumes. Coupez deux longueurs de 1 ″ de 2 2 2, un fil à noyau solide AWG et dépuisez environ 1 cm d’isolation à partir d’une extrémité de chaque fil. Groupez les 30 fils d’alimentation AWG à partir des capteurs tactiles capacitifs et des cordes LED, dépouillant environ 1 cm d’isolation à partir de leurs extrémités. Tournez les extrémités dépouillées ensemble. Faites de même avec les fils de terre des capteurs tactiles et des chaînes LED, y compris le fil de terre du câble Servo dans ce groupe. Lorsque vous tournez les fils ensemble, essayez de minimiser les enchevêtrements et les nœuds. Éton le tas de fils d’alimentation torsadés, puis soudez-le à l’extrémité dépouillée de l’un des morceaux de fil de noyau solide. Faites glisser un morceau de tube rétractable sur le joint et chauffer pour rétrécir.
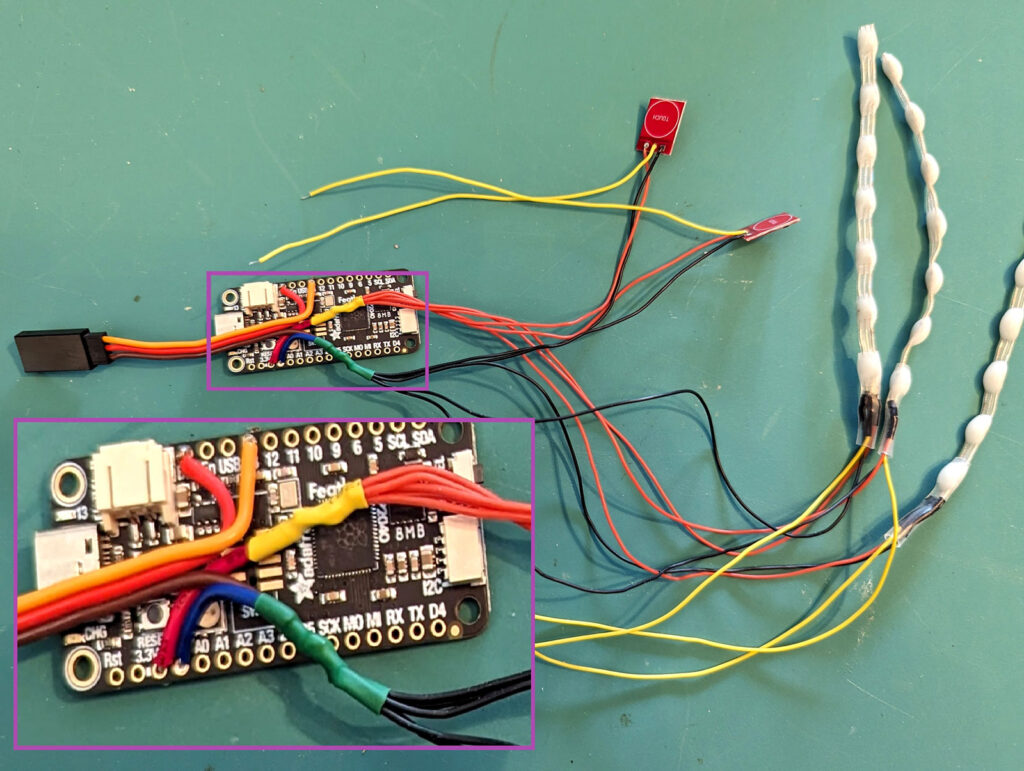
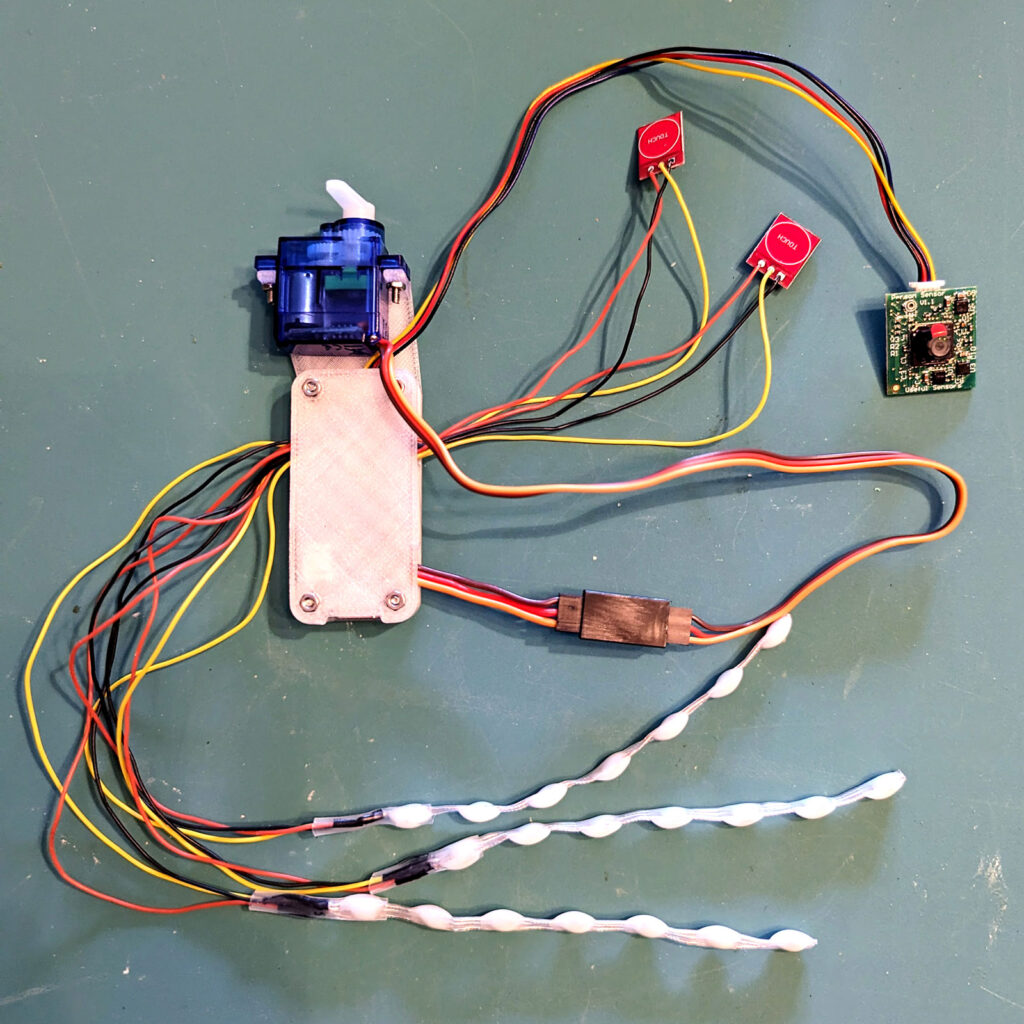
Répétez les mêmes étapes pour connecter le tas de 30 fils de terre AWG et le fil de terre du câble servo à la pièce restante de fil de noyau solide. Enfin, soudez les extrémités libres des morceaux de fil à noyau solide aux broches 3V et GND sur la plume 2040. À ce stade, le câblage doit ressembler à la figure T.
Ensuite, soudez les extrémités libres des fils de signal des capteurs tactiles aux broches de plumes D24 et D25, et les fils de signal des chaînes LED aux broches de plumes D10, D11 et D12.
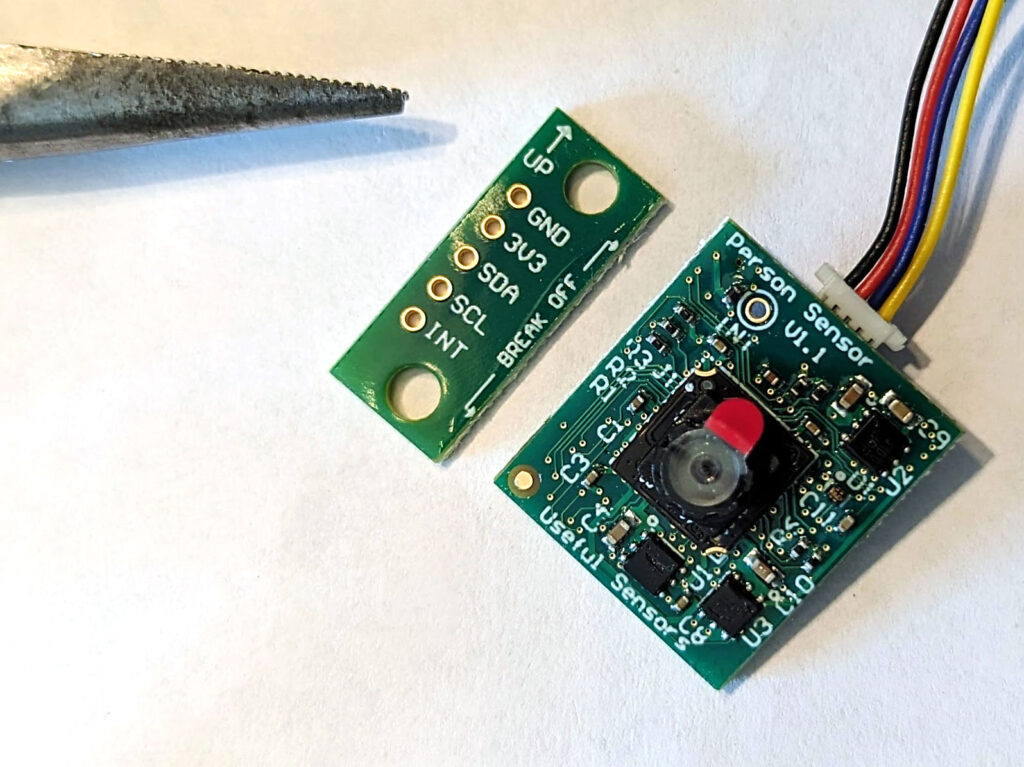
Prenez le capteur de la personne et utilisez soigneusement des pinces pour casser la partie de la planche étiquetée «Break Off» (figure U). Connectez le câble STEMMA QT aux connecteurs correspondants sur la plume et le capteur de la personne.
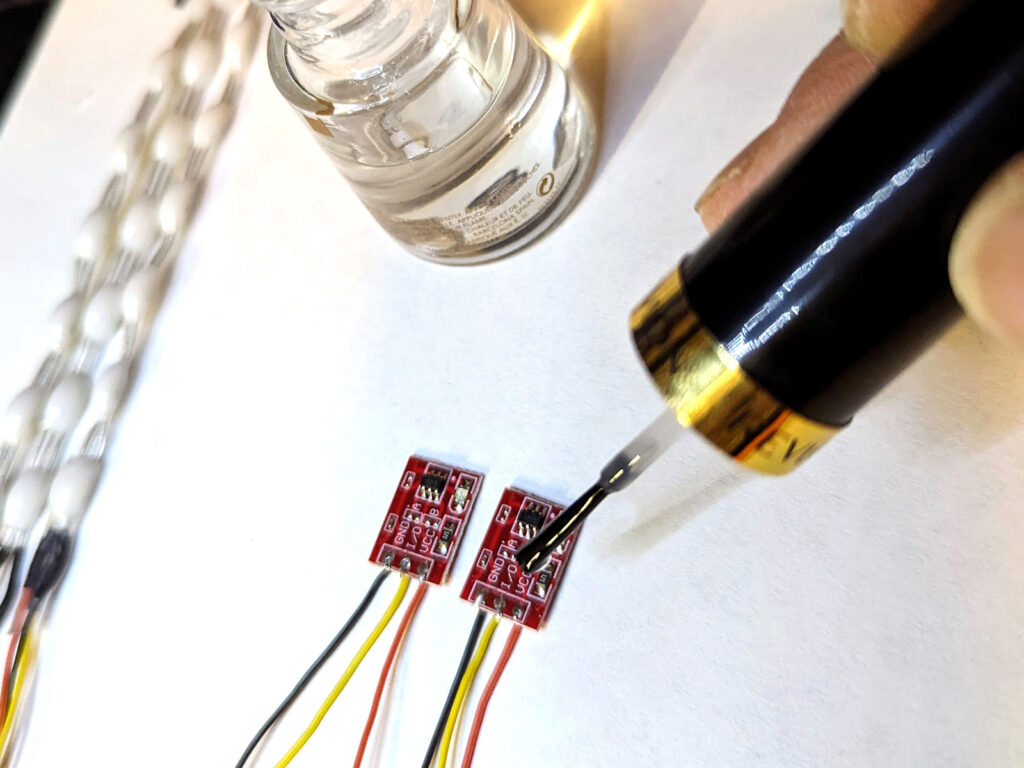
Nous enroberrons les planches de capteurs avec du vernis à ongles transparent pour une couche supplémentaire de protection et d’isolation. Prenez les capteurs tactiles et peignez une couche de vernis sur tout le côté contenant les minuscules composants SMT (figure V). Laissez le vernis sécher pendant 10 minutes. De l’autre côté des capteurs tactiles, peignez un peu de vernis sur les broches de soudure uniquement, en évitant la partie de la planche avec le mot «toucher».
De même, appliquez une couche de vernis transparent sur l’électronique de montage de surface des deux côtés du capteur de la personne, en faisant attention de ne pas peindre la lentille de la caméra ou le connecteur STEMMA QT.
Lorsque le vernis a soigneusement séché, insérez la plume dans l’enceinte imprimée en 3D, les fils périphériques s’étendant des trous latéraux de l’enceinte. Fixez le couvercle à la base avec les quatre vis et écrous de 12 mm M2 comme le montre la figure W.
Fixez le micro-servo sur les deux dents verticales sur le boîtier imprimé 3D avec les vis et écrous de 8 mm M2 comme indiqué. Orienter le servo afin que son arbre de sortie soit centré le long de l’extrémité courte du couvercle de l’enceinte. Fixez la corne unique à l’arbre de sorte que la corne pointe directement vers le haut au milieu de sa plage de rotation, puis vissez fermement la corne sur le servo. Branchez le connecteur servo sur le connecteur féminin s’étendant de la plume.



