
Vine Robot du MIT peut se faufiler à travers les décombres pour aider les intervenants d’urgence
- Robotique
 Noesis News
Noesis News- 0
- 9 minutes de lecture
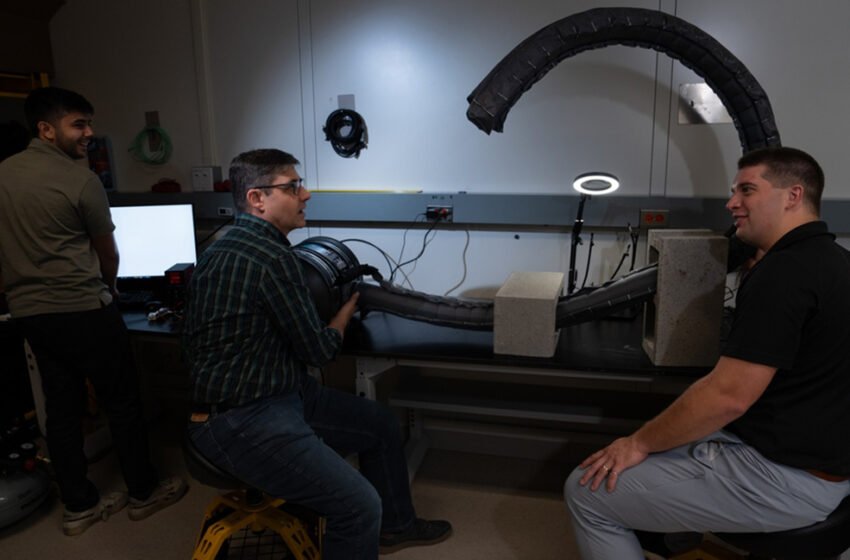
De gauche à droite: le stagiaire de recherche Ankush Dhawan et les membres du personnel du Lincoln Laboratory Council et Nathaniel Hanson testent un robot de vigne en laboratoire. | Source: Glen Cooper, MIT News
Des chercheurs du MIT Lincoln Laboratory, en collaboration avec l’Université de Notre Dame, ont créé un robot de type vigne qui peut se faufiler entre les décombres. Le robot pourrait atténuer le fardeau des intervenants d’urgence à la suite des effondrements structurels désastreux.
Lorsqu’une catastrophe majeure frappe, les intervenants d’urgence sont responsables de la recherche de personnes piégées sous des décombres et d’extraction soigneusement de ces victimes dans des environnements dangereux. Ce travail exténuant et 24h / 24 peut s’étendre pendant des jours ou des semaines, selon la taille de la catastrophe.
Alors que robots à pattes travaillent déjà dans des situations de récupération de catastrophe pour étudier les sommets des décombres, ils peuvent être endommagés dans des endroits serrés et instables. L’équipe de recherche conjointe a créé l’unité d’observation robotique de l’orientation Soft Path, ou Sprout. Ce nouveau système peut manœuvrer autour des obstacles et à travers de petits espaces.
Le robot doux Peut se gonfler et se dégonfler d’air pour se frayer un chemin sous des structures effondrées. Le Mit–Notre Dame Les chercheurs ont déclaré que les intervenants d’urgence peuvent le contrôler à distance pour explorer, cartographier et trouver des itinéraires entravés optimaux à travers des débris. Il est également conçu pour être à faible coût et facile à utiliser.
«L’environnement de recherche et de sauvetage urbaine peut être brutal et impitoyable, où même la technologie la plus durcie a du mal à fonctionner Laboratoire de Lincolndit NOUVELLES MIT. «La manière fondamentale d’un robot de vigne attire beaucoup de défis auxquels les autres plates-formes sont confrontées.»
Sprout a été développé en collaboration avec Margaret Coad, professeur à l’Université de Notre Dame et diplômé du MIT. Lors de la recherche de collaborateurs, Nathaniel Hanson – diplômé de Notre Dame et le chef du groupe – était déjà au courant du travail de Coad sur Vine Robots for Industrial Inspection.
La conception remet en question le MIT confronté à Sprout
https://www.youtube.com/watch?v=DAMCTH4QZTE
Sprout est composé d’un tube gonflable de tissu étanche à l’air. Le tube se déroule d’une base fixe avec un moteur qui contrôle le déploiement. À la pointe du tube, l’équipe a monté une caméra et d’autres capteurs. Au fur et à mesure que le tube se gonfle, il se développe en décombres, en serrant à travers des passages serrés, tandis que ses capteurs imagent et mappent l’environnement.
Actuellement, Sprout peut être utilisé à l’aide de joysticks et d’un écran qui affiche le flux de la caméra du robot. Il peut déployer jusqu’à 10 pieds (3 m), et l’équipe travaille à l’élargir à 25 pieds (7,6 m).
La conception flexible de Sprout le rend capable de pénétrer dans de petits espaces, mais il a également présenté un certain nombre de défis techniques pour les chercheurs. Par exemple, l’équipe a dû créer un système de contrôle qui pourrait déterminer comment appliquer la pression de l’air dans le robot déformable afin qu’il se déplace où l’opérateur le dirige.
De plus, l’équipe a dû concevoir le tube pour minimiser la frottement tandis que le robot grandit et concevait les commandes de la direction.

Inscrivez-vous maintenant pour ne pas manquer!
Construire des cartes de zones effondrées et tester la germination
L’équipe du MIT a déclaré qu’elle avait trouvé de nouvelles façons d’appliquer son robot mobile aux efforts de désastre, comme l’utilisation des données capturées par le téléopéré Système pour créer des cartes de vides souterrains.
« Les événements de l’effondrement sont des événements rares mais dévastateurs », a déclaré Hanson. «En robotique, nous voudrions généralement que les mesures de la truth au sol valident nos approches, mais celles-ci n’existent tout simplement pas pour les structures effondrées.»
Pour résoudre ce problème, Hanson et son équipe ont fait un simulateur qui leur permet de créer des représentations réalistes de structures effondrées et de développer des algorithmes qui mappent les espaces vides.
Lincoln Laboratory a testé Sprout avec les premiers intervenants du site de formation du Massachusetts Task Force 1 à Beverly, Mass. L’équipe prévoit une étude sur le terrain plus grande ce printemps.
«Les équipes de recherche et de sauvetage urbaines et les premiers intervenants servent des rôles critiques dans leurs communautés, mais ont généralement peu ou pas de budgets de recherche et de développement», a déclaré Hanson. «Ce programme nous a permis de pousser le niveau de préparation technologique des robots vignes au point où les répondeurs peuvent s’engager avec une démonstration pratique du système.»
La détection dans les espaces contraints n’est pas un problème unique aux communautés de réponse catastrophe, a-t-il ajouté. L’équipe envisage la technologie utilisée dans la maintenance des systèmes militaires ou des infrastructures critiques avec des emplacements difficiles à accès. Le programme initial s’est concentré sur la cartographie des espaces vides, mais les travaux futurs visent à localiser les dangers et à évaluer la viabilité et la sécurité des opérations par des décombres.

Le Conseil de Chad navigue dans le robot à travers des décombres sur le site de la Force de travail du Massachusetts 1. | Source: chercheur du MIT




{kind=link}